MATLAB中反向运动学与动力学干扰因素分析
版权申诉
MATLAB中的机械臂算法——动力学
在MATLAB这一强大的数值计算环境中,机械臂的动力学分析是实现精确控制的关键部分。机械臂的动力学主要包括正向运动学和反向运动学两个方面。
正向运动学研究的是当知道所有关节的角度时,如何计算末端执行器(end-effector)的位置和姿态。这在设计路径规划或模拟机械臂运动时非常有用。然而,对于实际操作中的控制,反向运动学更为关键。它指的是已知末端执行器的位置和方向时,如何逆向计算出每个关节应有的角度。这在控制环路中至关重要,因为控制器需要根据目标位置来调整关节角度,从而驱动机械臂执行任务。
在反向运动学控制逻辑中,一旦得到末端执行器的pose,控制器首先计算出所需关节角度,并通过电机产生相应的力矩(torque)。同时,为了减小控制误差并应对干扰因素,系统采用反馈机制,通过实时监测执行器的实际状态与期望状态的差异,进行实时调整。
干扰因素是实际机械臂控制中不可避免的问题,包括地球引力、惯性、摩擦力、科里奥利力和离心力等。连杆间的耦合导致了反作用力和反向惯量的存在。此外,人为设定的需求如速度控制、碰撞保护等也被视为干扰。为了使机械臂“完美”运行,需要在控制环路中加入前馈控制,也就是提前计算和补偿这些干扰,用数学模型如:
\[ u = M(q)qdd + C(q,qd)qd + G(q) \]
这里的\( u \)代表所需力矩,\( M(q) \)代表加速度惯量及连杆间惯量的矩阵,\( C(q,qd) \)处理科里奥利力和离心力的影响,\( G(q) \)则表示地球引力。这个方程是反向动力学的核心,它从关节角度\( q \)、速度\( qd \)和加速度\( qdd \)出发,预测每个关节所需的力矩,以实现预定的运动轨迹和性能。
正向动力学与反向动力学互为补充,前者用于理解机械臂的运动行为,后者则用于指导控制策略。在MATLAB中,通过编程和数值计算,工程师可以精确地设计和优化机械臂的运动控制,使其在复杂环境中稳定、高效地执行任务。通过深入理解和应用这些动力学原理,可以显著提升机械臂在工业自动化、机器人技术等领域中的性能和可靠性。
MATLAB中的机械臂算法中的机械臂算法——动力学动力学
机械臂的动力学
正向运动学指的是在已知机械臂各个关节角度的情况下,推算end-effector(机械臂终端)的位置和方向(合称pose)。反向
运动学指的是在已知end-effector的位置和方向,推算各个机械臂的关节角度。我们主要研究反向运动学。
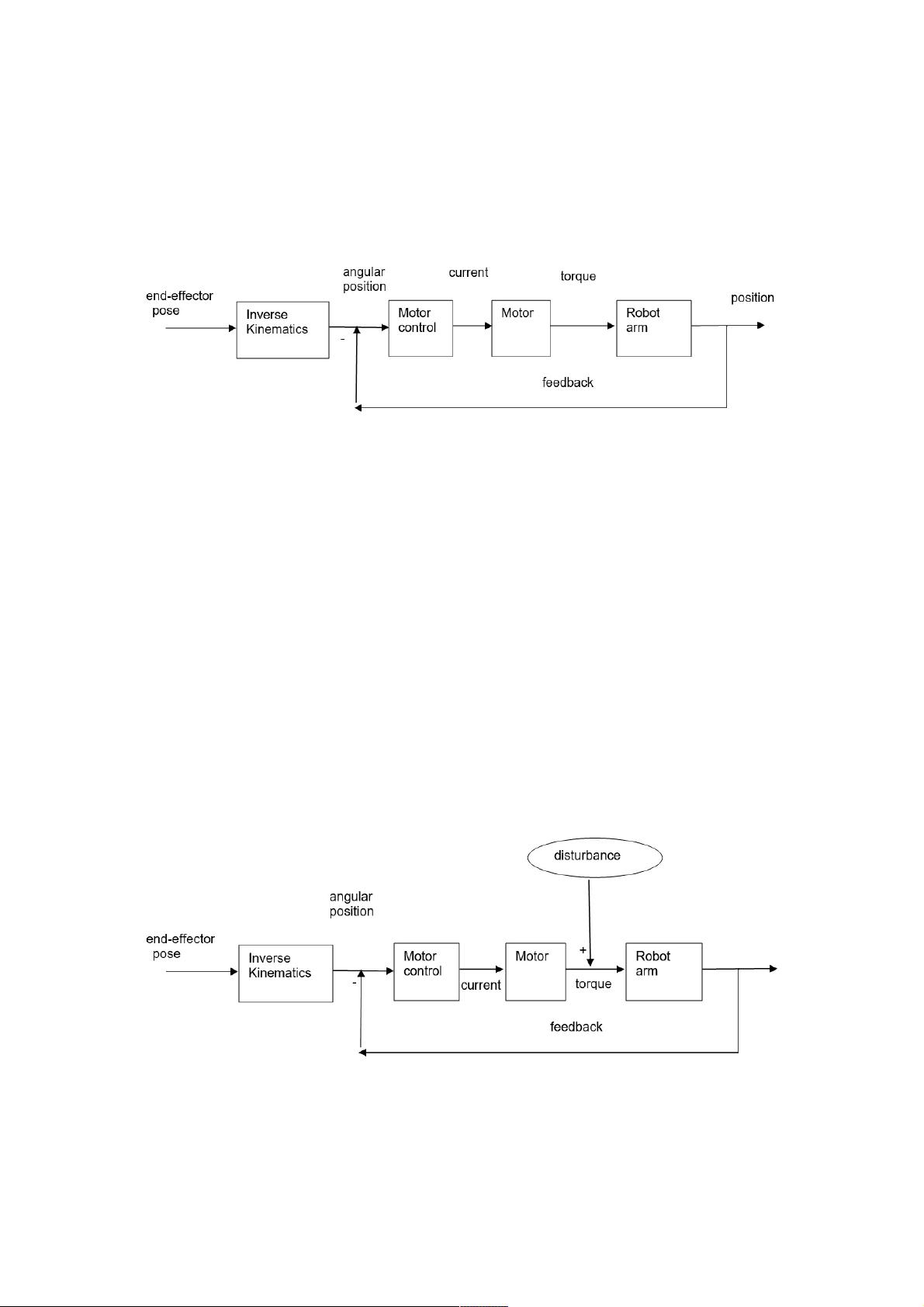
让我们看一下基于反向运动学的控制逻辑图:
在给出机械臂的end-effector的pose后,反运动学模块计算出各个关节所需要的角度,然后通过电机产生力矩(torque)去执行。
在此期间,通过反馈(feedback)去消除一些控制误差。
但是,事实上会有很多的干扰因素存在。例如:
地球引力(gravity)
惯量(inertia)
摩擦力(friction)
科里奥利力和离心力(Coriolis and centrifugal)
由于连杆之间是通过关节(joint)耦合在一起,连杆之间会有反作用力和反向惯量
以及一些人为的要求,例如:
我们想要机械臂运动的速度,按照我们预先的设定运行(velocity and acceleration)
我们想要求机械臂在触碰外物时候做出安全保护(external force)
这些我们暂且称之为disturbance(干扰),当然有些“干扰”是我们故意要求的,比如说需要按照预设轨迹的速度运行。加
入“干扰”后的示意图如下:
如果我们能提前计算出来这些“disturbance”,然后在控制环路中将它“抵消”(有时候也叫前馈控制)。这样,就能使得机械
臂“完美”运行了。让我们再改一下控制逻辑图:
下载后可阅读完整内容,剩余7页未读,立即下载
相关推荐


weixin_38537050
- 粉丝: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索最稳定版Ibatis 2.3.0.677及其使用文档
- 创意蓝紫配色iOS风格年终工作汇报PPT模板
- Asei Api: HTML技术应用开发的新视角
- Java结合Solr搜索引擎的小实例教程
- STM32实现NRF24L01中断接收方式的无线通信实验
- FreeMarker Java项目演示:解析javabean、map、list
- Spars工具包:提升Web交互体验的简约解决方案
- 商务演示必备极简蓝白微立体工作总结PPT模板
- Android音频资源整理:图标一览表
- 快速搭建JavaScript API:city_explorer_api教程指南
- Java WebService实例演示与搭建指南
- 通用极简线条扁平风工作总结PPT模板
- VB制作的简易万年历:融合时间、日期和农历
- STM32 WIFI Marvel 88W8688加密模式使用教程
- GPU-Z:显卡性能全面检测工具介绍
- Node.js入门示例:Hello World项目解析
