动态频谱租赁:认知无线电网络中的能源控制策略
需积分: 1 70 浏览量
更新于2024-09-16
收藏 422KB PDF 举报
"这篇论文探讨了在认知无线网络中通过主次用户功率控制游戏实现动态频谱租赁的方法,旨在提高频谱利用率并让主用户因允许次用户使用其授权频谱而得到奖励。"
在认知无线电网络中,动态频谱租赁(Dynamic Spectrum Leasing, DSL)是一种创新的频谱管理策略,它旨在解决传统通信系统中的频谱稀缺问题。与传统的分层动态频谱接入(Hierarchical Dynamic Spectrum Access, DSA)不同,后者主要关注如何控制次级用户的传输功率,DSL则引入了主用户的角色,让他们因允许次级用户使用其授权频谱而获得利益。
该论文由Sudharman K. Jayaweera和Tianming Li提出,发表在2009年6月的《IEEE Transactions on Wireless Communications》第8卷第6期中。他们构建了一个游戏理论框架,使主次用户都能参与动态频谱租赁过程。在这个框架中,主用户不仅仅是频谱的被动管理者,而是主动参与者,他们有权决定何时以及在多大程度上允许次级用户进入其频谱,以此获得奖励。
在认知无线电的功率控制游戏中,以往通常只考虑次级用户作为玩家的行为。然而,DSL网络中,主用户也成为了游戏的一部分。这种模式增加了频谱使用的灵活性,同时也确保了主用户的权益,因为他们可以通过租赁频谱获取经济或其他形式的回报。
论文提出的DSL网络模型鼓励主用户尽可能多地让次级用户使用频谱,这有助于提升整体网络的效率和容量。通过这种方式,主用户可以在不影响自身服务的前提下,利用闲置的频谱资源,同时次级用户也能找到更多的可用频谱进行通信,降低了频谱资源的浪费。
此外,该文还可能涉及了如何设计公平且有效的激励机制,以确保主次用户之间的合作是双赢的,以及如何通过优化算法来协调双方的功率控制策略,达到频谱利用率的最大化。论文可能会讨论各种可能的博弈策略,如合作博弈、非合作博弈,以及如何在这些博弈模型中平衡竞争与合作,以实现网络性能的优化。
这篇研究工作为认知无线电网络的频谱管理提供了一种新的视角,通过动态频谱租赁促进了主次用户的互动,有望推动未来无线通信系统的高效和公平使用。
3302 IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 8, NO. 6, JUNE 2009
Secondary
Cognitive Radio K
Secondary
Cognitive
Radio 2
Secondary
Cognitive
Radio 1
Secondary
User Base
Station
Primary User Base
Station
Primary User
Transmitter
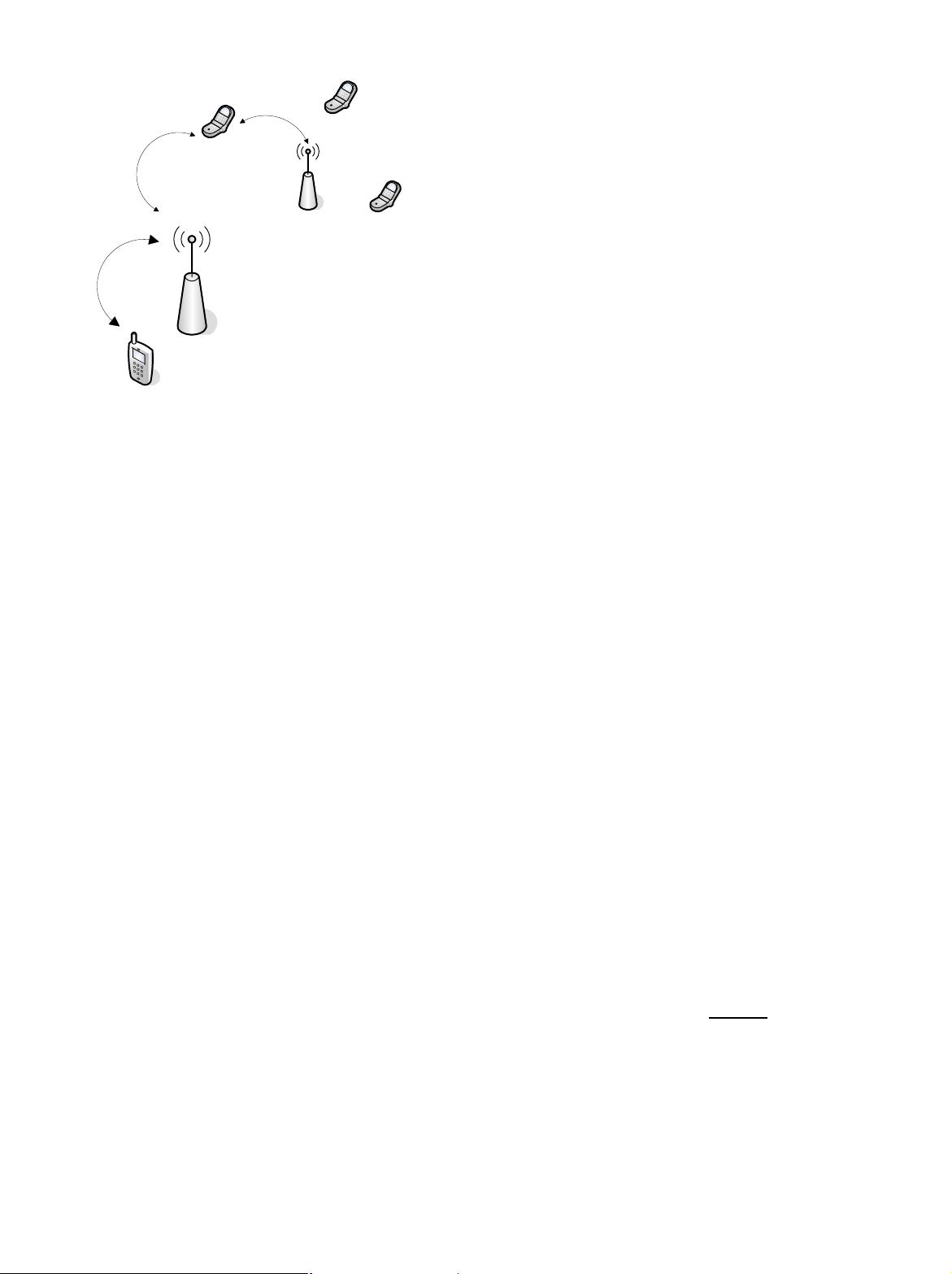
Fig. 1. The primary-secondary user communications system model.
although we limit ourselves to one primary transmitter for the
simplicity of exposition, the p roposed scheme can be extended
to include more than one primary user. Since the key ingre-
dient in the proposed concept of dynamic spectrum leasing is
the interaction between the primary system and the secondary
system, a single primary user is enough to demonstrate the key
aspects of dynamic spectrum leasing while avoiding extrane-
ous complications. However, in a realistic network, of course,
there will be multiple primary transmitters and their own
internal interactions will add an important dimension to th e
problem of dynamic spectrum leasing. There is one primary
receiver and one common secondary receiver in the system
(again,generalization to more than one is possible). The cross
correlation coefficients between the signalling waveforms of
the k-th secondary user and that of a primary user is denoted
by ρ
kp
, between a primary user and the k-th secondary user
is by ρ
pk
and between the k-th and the j-th secondary
users is by ρ
jk
for all k, j ∈{1, ···,K}. For simplicity,
throughout we will assume that ρ
kp
= ρ
pk
= ρ
sp
,forall
k ∈{1, ···,K}. The channel gain between the k-th secondary
user and the common secondary receiver is h
sk
, between the
k-th secondary user and the primary receiver is h
pk
, between
the primary user and the primary receiver is h
p0
, and between
the primary user and the common secondary receiver is h
s0
.
In the proposed formulation, the p rimary user can adapt its
interference cap, denoted by Q
0
, which is the maximum total
interference the primary user is willing to tolerate from all
secondary transmissions. However, the primary user should
always first strive to achieve its target SINR to ensure its
required QoS. This is an important constraint in the concept of
dynamic spectrum leasing since it is expected that the primary
system should first focus on its communication needs and
spectrum leasing is only an option to improve the spectrum
utilization. Note that, the QoS requirement in conjunction with
the c hosen interf e rence cap will directly determine the primary
user’s transmit power level. By adjusting the interference cap,
the p rimary user can indirectly control the total transmit power
the secondary users impose on the channel at any given time.
All secondary users adapt their transmission powers to achieve
a certain transmission quality. However, their transmission
powers must be carefully controlled in order to ensure low
interference to the primary user (within the a llowed interfer-
ence cap) as well as to other secondary users. We use P
0
and
p
k
to represent transmission powers of the primary user and
the k-th secondary user, respectively.
In the above cognitive dynamic spectrum leasing network,
the primary and secondary users interact with each other by
adjusting their actions in response to those of the others:
the primary u ser by adjusting its interfere nce cap (which, in
turn, determines its transmit power) and the secondary users
by controlling their transmit power levels. In essence, both
primary as well as secondary users act as rational decision
makers, thereby making game theory a n atural framework to
analyze and predict the behavior of this system. Formally, we
model our proposed scheme as the following non-cooperative
game:
1) Players: K = {0, 1, 2, ..., K},where0-th user is taken
to be the prima ry user and k =1, 2, ..., K represents the
k-th secondary user.
2) Action space: P = Q×P
1
×P
2
... ×P
K
,whereQ =
[0,
¯
Q
0
] represents the p rimary user’s action set and P
k
=
[0,
¯
P
k
],fork =1, 2, ..., K, represents the k-th secondary
user’s action set.
¯
Q
0
and
¯
P
k
represent, respectively, the
maximum allowed interference cap of the primary user
and the maximum allowed transmission power of the
k-th secondary user. The action vector of all users is
denoted by p =[Q
0
,p
1
, ..., p
K
],wherep
k
∈P
k
and
Q
0
∈Q. The action vector excluding the action of the
k-th user, for k =0, 1, 2, ..., K, is customarily denoted
by p
−k
.
3) Utility function: We use u
k
(p
k
, p
−k
) , ∀k =1, 2, ..., K
to represent the k-th secondary user’s utility function
and u
0
(Q
0
, p
−0
) to represent the primary user’s utility
function.
Throughout this paper, we assume that the primary receiver
is based on a matched-filter detector since we are limiting our-
selves to a primary system with only a single user. However,
it is possible to modify the proposed scheme for situations
in which the primary receiver can b e an ad vanced multiuser
detector, as will be required when one considers a primary
system with multiple transmitters. A ssuming a matched- filter
based primary receiver, the primary user’s target SINR is
defined as:
¯γ
0
=
h
2
p0
P
0
Q
0
+ σ
2
, (1)
where P
0
and Q
0
represent the primary user’s transmission
power and its chosen interference cap, respectively, and σ
2
is
the variance o f the additive noise at the primary receiver. Note
that, since Q
0
is the maximum interference from secondary
users the primary user is willing to tolerate at any given
time, ¯γ
0
in (1) represents the worst-case transmission quality
the primary user can expect with its chosen Q
0
. Since this
worst-case SINR needs to guarantee a required QoS constraint,
the prima ry user’s tr ansmit power is thus directly determined
剩余10页未读,继续阅读
2009-07-14 上传
2023-04-05 上传
2023-03-09 上传
2023-05-21 上传
2024-07-27 上传
2023-06-11 上传
2023-05-15 上传
2023-09-30 上传
2023-06-08 上传
2023-05-11 上传

away1990
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
