主动神经SLAM:探索3D环境的模块化方法
需积分: 9 147 浏览量
更新于2024-07-09
收藏 3.88MB PDF 举报
"LEARNING TO EXPLORE USING ACTIVE NEURAL SLAM是计算机视觉领域的开源论文,由Devendra Singh Chaplot等人撰写,他们在 Carnegie Mellon University、Facebook AI Research 和 UIUC 工作。该研究提出了一种模块化和分层的方法,称为'主动神经SLAM',用于学习探索3D环境的策略。项目网页和代码可在提供的链接中找到。
论文摘要提到,这种方法结合了传统方法(如分析路径规划器)和基于学习的方法,利用学习的SLAM模块和全局及局部策略。通过学习,它可以灵活处理不同的输入模态,利用世界结构的规则性来指导全局策略,并增强对状态估计错误的鲁棒性。通过在每个模块内部使用学习,同时保持其优点,分层分解和模块化训练避免了端到端策略训练的高样本复杂性。"
**主动神经SLAM (Active Neural SLAM) 知识点详解:**
1. **SLAM(Simultaneous Localization and Mapping)**: SLAM是机器人领域的一个关键问题,它涉及到同时定位和建图。在SLAM过程中,机器人尝试构建一个未知环境的地图,同时确定其在地图中的位置。传统的SLAM算法通常依赖于传感器数据(如激光雷达或摄像头)并采用数学优化方法。
2. **模块化与分层方法**: 主动神经SLAM采用模块化设计,这意味着系统可以分为可独立训练和优化的部分,如定位模块、映射模块和决策模块。分层结构允许复杂任务被分解成更小的子任务,降低了整体的学习难度和计算复杂度。
3. **学习与传统方法的结合**: 该方法结合了学习和经典方法的优势。学习模块能够适应不同输入类型,比如视觉、激光雷达等,而经典路径规划器则提供了一种有效的解决方案,确保了在复杂环境中的可行性。
4. **全局和局部策略**: 全局策略关注整个环境的探索,而局部策略则聚焦于即时的决策,如避障或导航。这种分离允许系统在大范围探索和短距离操作之间灵活切换。
5. **学习的鲁棒性**: 通过学习,系统可以适应状态估计中的误差,这在现实世界的环境中尤为重要,因为传感器数据可能存在噪声或不确定性。
6. **端到端训练的挑战**: 在传统的端到端学习中,整个系统作为一个整体进行训练,这通常需要大量的样本和计算资源。而主动神经SLAM的模块化训练策略则降低了这种需求,使得学习过程更高效。
7. **项目网页与代码**: 提供的项目网页和GitHub代码库为研究者和开发者提供了实际实现和进一步研究的平台,有助于推动该领域的进展和应用。
主动神经SLAM是一种创新的机器人探索策略,它通过融合经典算法和机器学习,实现了更高效、灵活和鲁棒的3D环境探索。这种方法不仅提高了系统的性能,还降低了训练复杂性,为未来的研究提供了新的方向。
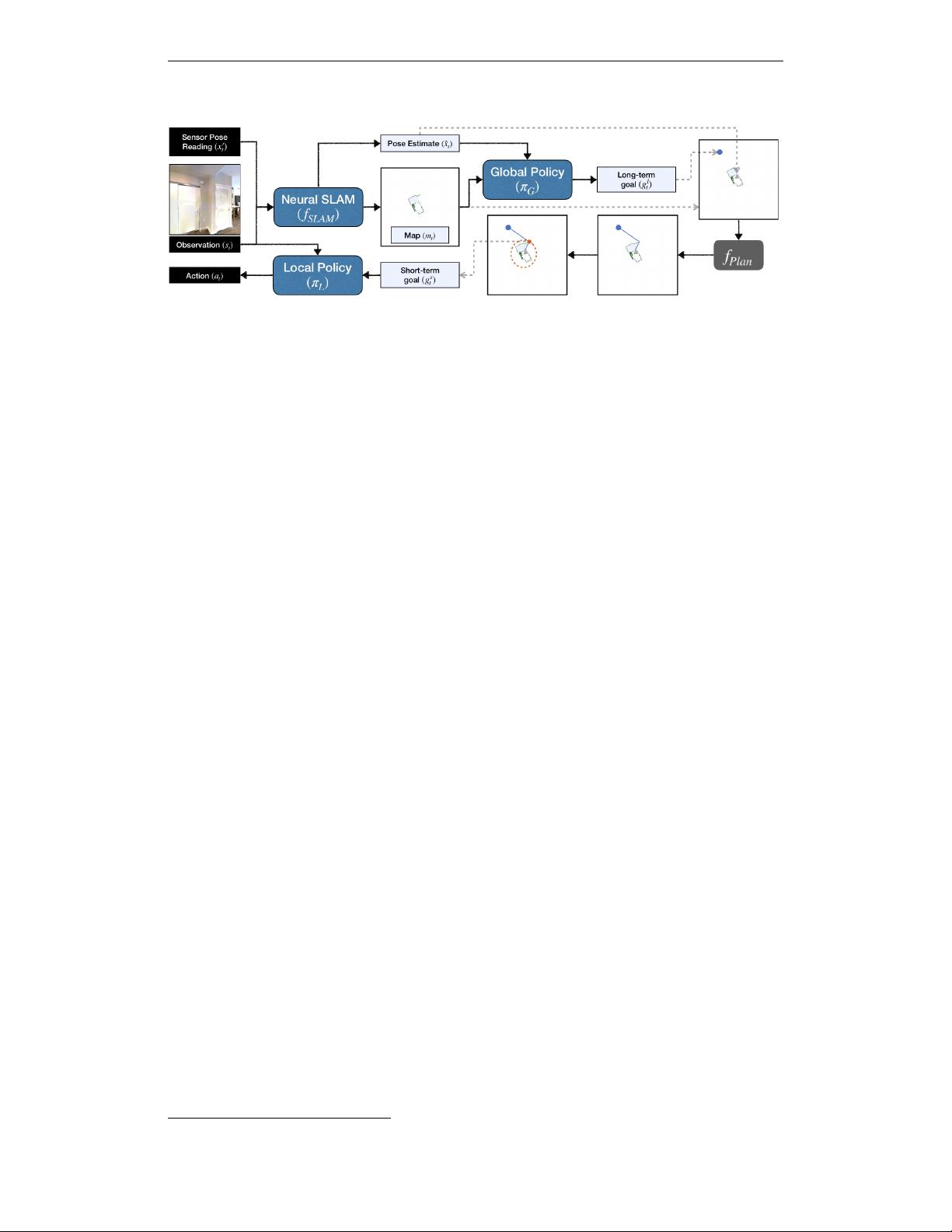
Figure 1: Overview of our approach
. The Neural SLAM module predicts a map and agent pose estimate from
incoming RGB observations and sensor readings. This map and pose are used by a Global policy to output a
long-term goal, which is converted to a short-term goal using an analytic path planner. A Local Policy is trained
to navigate to this short-term goal.
u
F orward
= (0.25, 0, 0)
,
u
Right
: (0, 0, −10 ∗ π/180)
and
u
Left
: (0, 0, 10 ∗ π/180)
. In practice, a
robot can also rotate slightly while moving forward and translate a bit while rotating on-the-spot,
creating rotational actuation noise in forward action and similarly, a translation actuation noise in
on-the-spot rotation actions.
We use a LoCoBot
1
to collect data for building the actuation and sensor noise models. We use the
pyrobot API (Murali et al., 2019) along with ROS (Quigley et al., 2009) to implement the control
commands and get sensor readings. For each action
a
, we fit a separate Gaussian Mixture Model
for the actuation noise and sensor noise, making a total of 6 models. Each component in these
Gaussian mixture models is a multi-variate Gaussian in 3 variables,
x
,
y
and
o
. For each model, we
collect 600 datapoints. The number of components in each Gaussian mixture model is chosen using
cross-validation. We implement these actuation and sensor noise models in the Habitat simulator for
our experiments. We have released the noise models, along with their implementation in the Habitat
simulator in the open-source code.
4 METHODS
We propose a modular navigation model, ‘Active Neural SLAM’. It consists of three components: a
Neural SLAM module, a Global policy and a Local policy as shown in Figure 1. The Neural SLAM
module predicts the map of the environment and the agent pose based on the current observations
and previous predictions. The Global policy uses the predicted map and agent pose to produce a
long-term goal. The long-term goal is converted into a short-term goal using path planning. The
Local policy takes navigational actions based on the current observation to reach the short-term goal.
Map Representation.
The Active Neural SLAM model internally maintains a spatial map,
m
t
and
pose of the agent
x
t
. The spatial map,
m
t
, is a
2 × M × M
matrix where
M × M
denotes the
map size and each element in this spatial map corresponds to a cell of size
25cm
2
(
5cm × 5cm
)
in the physical world. Each element in the first channel denotes the probability of an obstacle at
the corresponding location and each element in the second channel denotes the probability of that
location being explored. A cell is considered to be explored when it is known to be free space or an
obstacle. The spatial map is initialized with all zeros at the beginning of an episode,
m
0
= [0]
2×M×M
.
The pose
x
t
∈ R
3
denotes the
x
and
y
coordinates of the agent and the orientation of the agent at
time
t
. The agent always starts at the center of the map facing east at the beginning of the episode,
x
0
= (M/2, M/2, 0.0).
Neural SLAM Module.
The Neural SLAM Module (
f
SLAM
) takes in the current RGB observation,
s
t
, the current and last sensor reading of the agent pose
x
0
t−1:t
, last agent pose and map estimates,
ˆx
t−1
, m
t−1
and outputs an updated map,
m
t
, and the current agent pose estimate,
ˆx
t
, (see Figure
2):
m
t
, ˆx
t
= f
SLAM
(s
t
, x
0
t−1:t
, ˆx
t−1
, m
t−1
|θ
S
)
, where
θ
S
denote the trainable parameters of the
Neural SLAM module. It consists of two learned components, a Mapper and a Pose Estimator. The
Mapper (
f
Map
) outputs a egocentric top-down 2D spatial map,
p
eg o
t
∈ [0, 1]
2×V ×V
(where
V
is
the vision range), predicting the obstacles and the explored area in the current observation. The
Pose Estimator (
f
P E
) predicts the agent pose (
ˆx
t
) based on past pose estimate (
ˆx
t−1
) and last two
1
http://locobot.org
4
剩余17页未读,继续阅读
2020-09-14 上传
2018-07-29 上传
2021-04-22 上传
2019-09-12 上传
2018-04-14 上传
2019-02-07 上传
2016-05-28 上传
2016-10-25 上传
2016-07-23 上传

潜夙
- 粉丝: 0
- 资源: 40
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
