自适应滤波器理论与实现:LMS与RLS算法比较及FIR设计
需积分: 50 141 浏览量
更新于2024-07-20
4
收藏 911KB DOC 举报
"自适应滤波器的设计与实现"
本文详细探讨了自适应滤波器的理论、设计方法及其在实际应用中的重要性。自适应滤波器是一种在不断变化的环境或非平稳信号处理中非常有效的工具,尤其适用于处理未知统计特性的信号。由于无法预先获取所有必要的信息来设计固定系数的滤波器,或者滤波条件会随时间变化,自适应滤波器应运而生,提供了一种灵活且高效的方法。
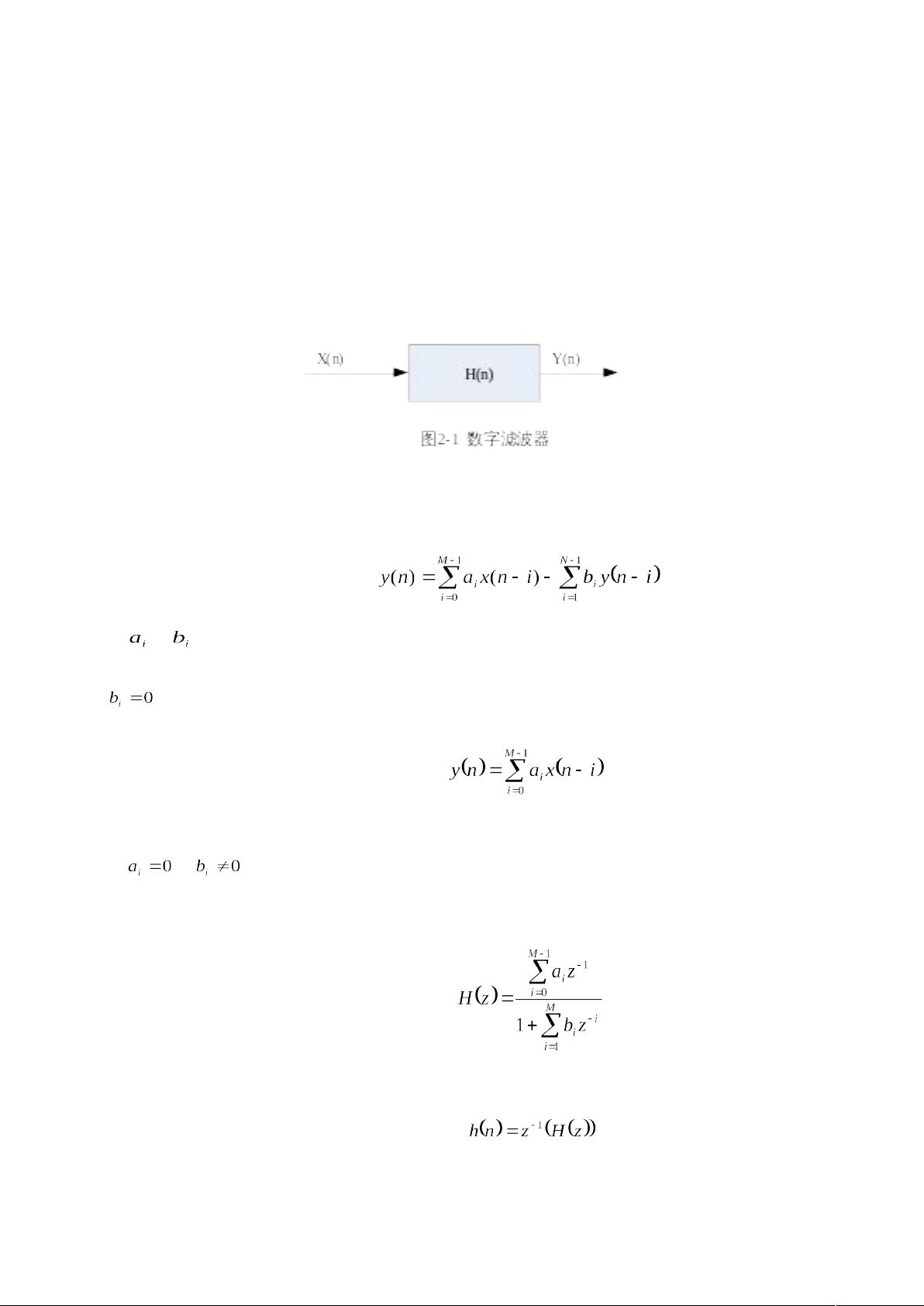
在理论基础部分,文章介绍了滤波器的基本概念,包括数字滤波器,它通过特定的数学运算对信号进行处理以达到某种特定目标,如消除噪声、平滑信号或提取特征。自适应滤波器的核心在于其可以根据输入信号的变化自动调整滤波器系数,以最佳地匹配当前信号环境。
接着,文章深入到自适应滤波算法,特别是最小均方误差(LMS)算法和递归最小二乘(RLS)算法。LMS算法以其简单性和低计算复杂度而被广泛使用,但可能收敛速度较慢;而RLS算法虽然具有更快的收敛速度,但计算复杂度更高,对硬件资源要求较大。通过对这两种算法的比较,可以更好地理解它们的适用场景。
在滤波器设计部分,文章讨论了无限冲激响应(IIR)和有限冲激响应(FIR)两种类型的自适应滤波器。IIR滤波器利用反馈机制实现,可以以较少的阶数获得宽频带响应,但可能存在稳定性问题。FIR滤波器则完全由冲激响应的有限长度决定,稳定性好,但需要更多的系数。文章详细阐述了两种滤波器的结构和工作原理,并对比了它们的优缺点。
最后,文章提到了使用数字信号处理器(DSP)实现自适应滤波器的实践。MATLAB作为一种强大的仿真工具,被用来验证改进的LMS算法设计的FIR自适应滤波器。通过仿真和实现在DSP上的运行,证明了所设计滤波器的有效性和优越性能。
本文为读者提供了全面的自适应滤波器知识,从理论到实践,涵盖了关键的算法、设计方法以及实现平台,对于理解和应用自适应滤波技术具有很高的参考价值。

1.4 本文研究思路与主要工作
本文设计要求使用 DSP 实现自适应滤波器,要求完成自适应滤波器的设计和调试。
自适应滤波器的设计需要使用自适应算法(LMS 算法),LMS 算法是通过对未知系
统传递函数的建模,识别该未知系统,并对该系统进行噪声滤波。
自适应滤波器,其权系数可以根据自适应算法来不断修改,使得系统中的冲激响
应满足给定的性能。例如语音信号的 ADPCM 编码,采用线性预测自适应就可以实现
误差信号与输入信号的线性无关,并由此作为依据,不断调节滤波器的权系数,最终
使得误差信号趋近于 0,使得该滤波器完全适应该输入信号;同样,只要输入信号出现
变换,自适应滤波器根据误差信号的变化再次调整其权系数,从而跟上信号的变化。
自适应滤波器设计的算法采用的是自适应算法,即 LMS 算法。LMS 算法是通过对未
知系统传递函数的建模,识别该未知系统,并对该系统进行噪声滤波。
2 自适应滤波器理论基础
2.1 滤波器的基本概念
凡是有能力进行信号处理的装置都可以称为滤波器。在近代电信装备和各类控制
系统中,滤波器应用极为广泛;在所有的电子部件中,使用最多,技术最复杂要算滤
波器了。滤波器的优劣直接决定产品的优劣,所以,对滤波器的研究和生产历来为各
国所重视。
滤波器是一种用来消除干扰杂讯的器件,将输入或输出经过过滤而得到纯净的交
流电。您可以通过基本的滤波器积木块——二阶通用滤波器传递函数,推导出最通用
的滤波器类型:低通、带通、高通、陷波和椭圆型滤波器。传递函数的参数——
f0、d、hHP、hBP 和 hLP,可用来构造所有类型的滤波器。转降频率 f0 为 s 项开始
占支配作用时的频率。设计者将低于此值的频率看作是低频,而将高于此值的频率看
作是高频,并将在此值附近的频率看作是带内频率。阻尼 d 用于测量滤波器如何从低
频率转变至高频率,它是滤波器趋向振荡的一个指标,实际阻尼值从 0 至 2 变化。高
通系数 hHP 是对那些高于转降频率的频率起支配作用的分子的系数。带通系数 hBP
是对那些在转降频率附近的频率起支配作用的分子的系数。低通系数 hLP 是对那些低
于转降频率的频率起支配作用的分子的系数。设计者只需这 5 个参数即可定义一个滤
5
剩余36页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-10-16 上传
2021-10-16 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-06-08 上传

行走的路人GB90
- 粉丝: 13
- 资源: 62
 我的内容管理
展开
我的内容管理
展开







最新资源
- wsn-(2).zip_matlab例程_matlab_
- RedisView:RedisView通过自定义的RESP协议解析,自定义的树模型和线程池,实现了开源,跨平台和高性能的Redis接口工具。 RedisView业余爱好通过自写RESP协议解析,自写树模型,线程池实现开源,跨平台,高级Redis界面图形化工具
- PyPI 官网下载 | tencentcloud-sdk-python-cfs-3.0.447.tar.gz
- TheSquirrelCafe:物联网松鼠喂食器
- ZDWW-OA:zdww-OA
- BMI计算器:BMI计算器
- powertabeditor:跨平台的吉他谱编辑器
- CTProjSim.zip_matlab例程_matlab_
- 参考资料-WI-NK0102档案分类及保管期限表.zip
- refactoring
- Tradedoubler for Publishers-crx插件
- KMV的MATLAB的代码-CarND-Behavioral-Cloning:CarND行为克隆
- BtShell-开源
- SigDigger:基于Qt的数字信号分析仪,使用Suscan内核和Sigutils DSP库
- x86.zip
- feedback:Laravel反馈请求包
