图形对决策图构造:拓扑符号电路分析新方法
88 浏览量
更新于2024-08-26
收藏 1.83MB PDF 举报
"拓扑符号电路分析的图对决策图构造"
在电子工程和计算机辅助设计(CAD)领域,拓扑符号电路分析是一种重要的技术,它关注于在频域或时域中对电路响应的分析。为了进行这种分析,需要一个高效的数据结构来表示和操作电路的复杂性。近年来,二进制决策图(Binary Decision Diagram, BDD)被证明是此类应用的理想选择,因为它能以紧凑的形式表示大量的乘积项,并且可以直接在其上执行数值计算和逻辑推理。
二进制决策图是一种特殊的图结构,用于表示布尔函数,它通过最少的节点数量来表示多个变量的组合逻辑。在电路分析中,BDD可以用来表示电路的频率或时间域响应,从而减少计算复杂性和存储需求。然而,构建适合电路分析的BDD方法是关键,需要高效且避免冗余。
该研究论文"Graph-Pair Decision Diagram Construction for Topological Symbolic Circuit Analysis"由Guoyong Shi发表在2013年的IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems期刊上。论文提出了一种基于图的构造方法,称为图对决策图(Graph-Pair Decision Diagram, GPDD)。这种方法针对小信号电路,首先创建一对代表电路的图,然后通过逐步减少图对来构建GPDD。
GPDD算法的独特之处在于它能够生成无取消的符号项,这意味着在构造过程中,电路的各个部分被有效地组合和简化,而不会丢失任何重要信息。这与传统的BDD构造方法不同,后者可能在处理某些复杂电路时产生冗余或错误的表示。
通过使用GPDD,工程师可以更准确、更快速地分析电路的频率响应,这对于理解和优化电子系统至关重要。这种方法特别适用于那些包含大量交互组件的复杂电路,如模拟集成电路和混合信号系统。GPDD的引入提高了符号电路分析的效率,减少了计算时间和内存占用,从而推动了CAD工具的进步。
这篇研究论文提出了图对决策图作为一种新的数据结构,用于拓扑符号电路分析。GPDD方法通过创建和优化图对,有效地表达了电路的响应,为电路设计和分析提供了强大的工具,特别是在处理大型和复杂电路时。这种方法不仅简化了计算过程,还提升了分析的精度,对于电子设计自动化领域的研究具有深远的影响。
SHI: GPDD CONSTRUCTION FOR TOPOLOGICAL SYMBOLIC CIRCUIT ANALYSIS 277
TABLE I
Numerical Example of the Accuracy of DDD and GPDD
Compared to HSPICE
Frequency (MHz) DDD
GPDD HSPICE
1.0
85.0209 m 87.3602 m 87.3602 m
– j* 31.6611 m
– j* 32.8376 m
– j* 32.8376 m
1.2589
83.6939 m 82.0204 m 82.0204 m
– j* 40.9321 m – j* 39.1951 m – j* 39.1951 m
1.5849
75.9776 m 74.5941 m 74.5941 m
– j* 46.0198 m – j* 45.5875 m
– j* 45.5875 m
1.9953
63.2133 m 64.8671 m 64.8671 m
– j* 50.5768 m – j* 51.1960 m – j* 51.1960 m
2.5119 53.2409 m 53.0812 m 53.0812 m
– j* 54.0665 m – j* 54.9973 m – j* 54.9973 m
3.1623
38.7670 m 40.0795 m 40.0795 m
– j* 54.9795 m
– j* 56.0960 m – j* 56.0960 m
3.9811 28.0921 m
27.1470 m
27.1470 m
– j* 55.8945 m – j* 54.1379 m – j* 54.1379 m
5.0119 14.9771 m 15.5552 m 15.5552 m
– j* 48.1816 m
– j* 49.4947 m – j* 49.4947 m
A. Benefits of Cancellation-Free Analysis
Table I shows a comparison of numerical ac analysis results
for the circuit given in Fig. 1 (after a rough sizing) computed
by two symbolic methods DDD and GPDD. The small-signal
model used is shown in Fig. 2. In numerical evaluation, the
resistor values were intentionally made small in the small-
signal model. It is seen that the numerical ac response com-
puted by the DDD program has noticeable error compared
to the reference results computed by the HSPICE simulator,
while the cancellation-free GPDD program (to be established)
computed the ac response exactly equal to that of HSPICE. It
was also observed that the error with the DDD program varied
with the circuit element values, whereas the GPDD program
was more robust in numerical accuracy. The cancellation-free
property also has other applications such as in the response
bound estimation for circuits subject to process variation as
addressed in the recent work [6].
B. Definitions and Main Result
A symbolic analysis method should be able to deal with a
linear circuit containing a set of commonly encountered ele-
ments, which include admittance or impedance elements, and
four types of dependent sources: voltage-controlled voltage
source (VCVS), the E-element in SPICE, current-controlled
current source (CCCS), the F -element in SPICE, voltage-
controlled current source (VCCS), the G-element in SPICE,
current-controlled voltage source (CCVS), the H-element in
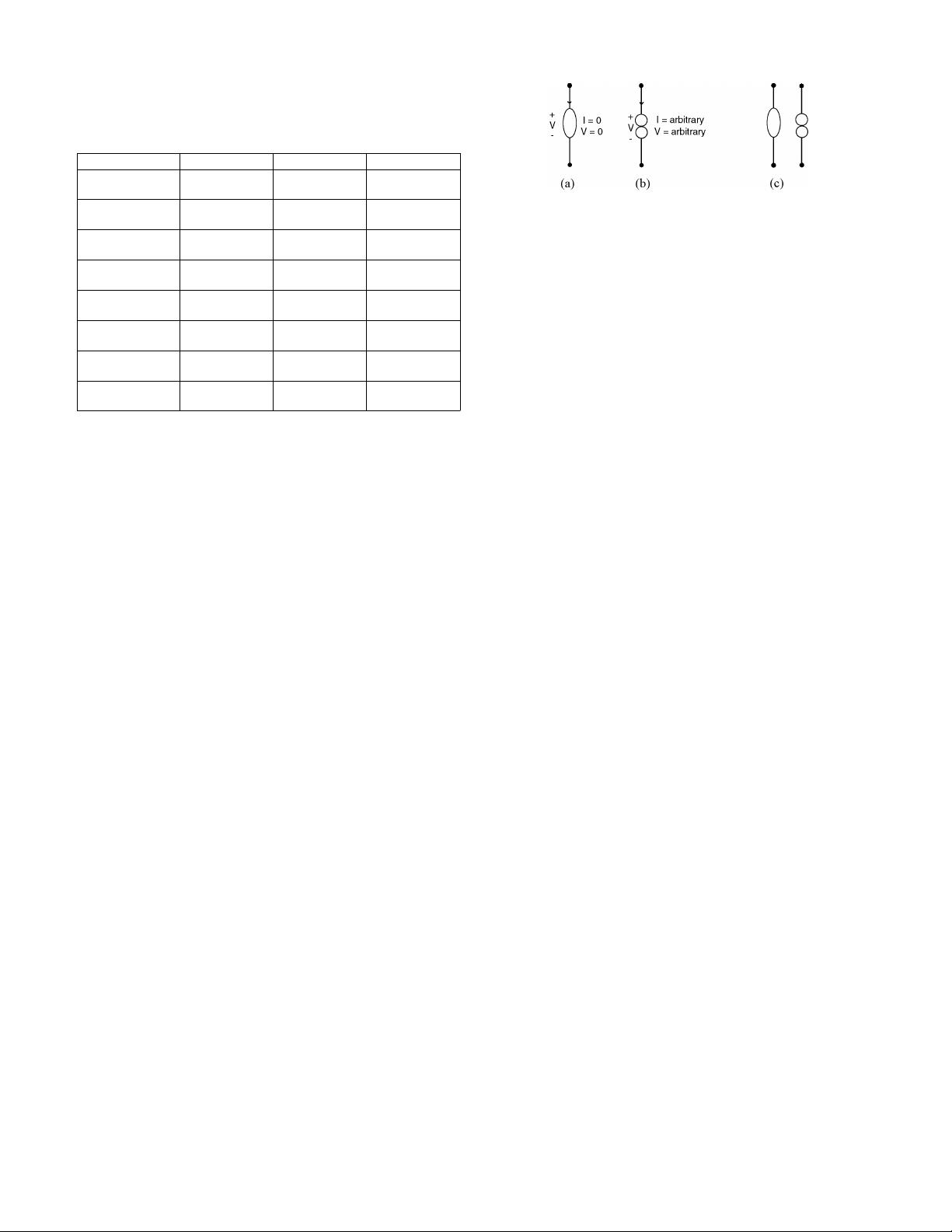
SPICE, and ideal opamps modeled as nullors. A nullor consists
of a nullator and a norator shown in Fig. 3. Nullor is useful
in many linear circuit design problems, such as in switched-
capacitor filters [23]. A major task of this paper is to establish
a set of graph-processing rules for such a set of circuit
elements.
Assumption 1 (Basic Assumption): The following circuit
elements are allowed for GPDD symbolic analysis:
1) linear lumped circuit elements of impedance, ad-
mittance, dependent sources (VCVS, CCCS, VCCS,
CCVS), nullors, and independent sources;
Fig. 3. (a) Nullator. (b) Norator. (c) Nullor.
2) multiple-input multiple-output (MIMO) dependent
sources.
The dependent sources are crucial in linear active circuit
analysis, but treated differently in the traditional symbolic
methods. By modified nodal analysis (MNA), extra current
variables are introduced for the controlled voltage sources
[24]. The well-known two-graph method [25] is based on a
pair of graphs created from the circuit admittance matrix. Its
original formulation does not deal with the non-VCCS-type
dependent sources. The work in [13] introduced type conver-
sions in order to apply the two-graph method for symbolic
analysis. In contrast, the graph-pair method introduced in this
paper processes a pair of graphs directly constructed from
the circuit itself (rather than from its admittance matrix) and
this method can deal with all four types of dependent sources
without the need of type conversion. The work in [26] made
a preliminary contribution to this idea.
A graph-based symbolic analysis method is mainly rule
based. The GPDD method starts from an initial graph that is
created from a given circuit according to several rules. These
rules define the graph edges, the edge directions, and the edge
dependence. We assume for now that a linearized circuit is a
single input and single output. Extension to the MIMO case
is addressed later.
Circuit Graph Construction Rules
1) All dependent source edges are directed; a voltage edge
is directed from the polarity + to − and a current edge
is directed by the given reference direction.
2) An edge is allocated to a controlling voltage (referred to
as VC hereafter) in the graph where the voltage exists. If
one voltage controls m sources (m>1), then m parallel
edges are allocated in the graph where the controlling
voltage exists; each controlling edge is associated with
one controlled source edge.
3) An edge is allocated to a controlling current (referred to
as CC hereafter) in the graph where the current flows.
In case the same current controls m sources (m>1),
then a series of m edges cascaded one after another
are allocated in the graph; each is associated with one
controlled source edge.
4) Any relayed dependent sources are broken up into pair-
wise dependent edges. For example, if edge a controls
edge b, edge b, in turn, controls edge c. Then an extra
edge b
is allocated in parallel to b if b is a voltage (or
in series to b if b is a current) so that edge b
is only
associated with edge c.
5) An ideal opamp is replaced by a pair of nullor edges,
i.e., a nullator edge (referred to as NUL hereafter) and
剩余13页未读,继续阅读
2020-07-18 上传
2021-04-22 上传
2011-12-09 上传
点击了解资源详情
点击了解资源详情
2021-09-22 上传

weixin_38606897
- 粉丝: 7
- 资源: 892
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
