Matlab张正友摄像机标定详解:关键概念与误差分析
需积分: 14 151 浏览量
更新于2024-07-17
5
收藏 2.08MB DOC 举报
Matlab张正友标定详解文档深入讲解了在计算机视觉领域中,如何使用Matlab进行摄像机标定的细节。标定过程涉及的关键概念包括:
1. 旋转矩阵与旋转矢量:
在Matlab的摄像机标定中,旋转矩阵(Rc_ext)是由旋转矢量(omc_ext)通过Rodrigues公式计算得出的,用于描述摄像头坐标系与网格坐标系之间的旋转关系。这个公式确保了从一个坐标系到另一个坐标系的旋转转换精确。
2. 坐标变换:
摄像头坐标系中的点与网格坐标系中的点之间存在线性变换,由旋转矩阵和平移矢量决定。具体来说,一个点在摄像机坐标系下的坐标可以通过公式XXc = Rc_ext * XX + Tc_ext 来计算,其中cc是主点坐标,代表摄像机的光学中心。
3. 再投影与再投影误差:
再投影指的是利用已知的标定参数,将物体空间的点投影回相机的各个视图,形成新的图像。再投影误差则是新投影点与原始图像中对应像素点的差异,反映了标定精度。Matlab通过颜色编码不同帧来展示这些误差。
4. 摄像机参数的理解:
在标定结果中,焦距可能有两个值,这是因为在像素尺寸不一致的情况下,横纵方向的焦距计算是不同的。实际上,这反映了像素尺寸对焦距测量的影响。
5. 像点与物点位移的转换:
当知道了像点在图像中的位移后,可以利用实际焦距值(fcr1和fcr2)来推算出相对应的物点在三维空间中的位移。通过公式像点位移 / fcr = 物点位移 / 物距,可以进行这种转换,其中像点位移沿x和y方向,物点位移则是沿相应坐标轴。
总结来说,Matlab张正友标定详解文档详细介绍了摄像机标定过程中涉及到的几何变换、误差分析和参数理解,这对于理解和应用计算机视觉技术至关重要。通过这些步骤,研究人员和工程师能够准确地校准摄像头,提高图像处理和三维重建的质量。
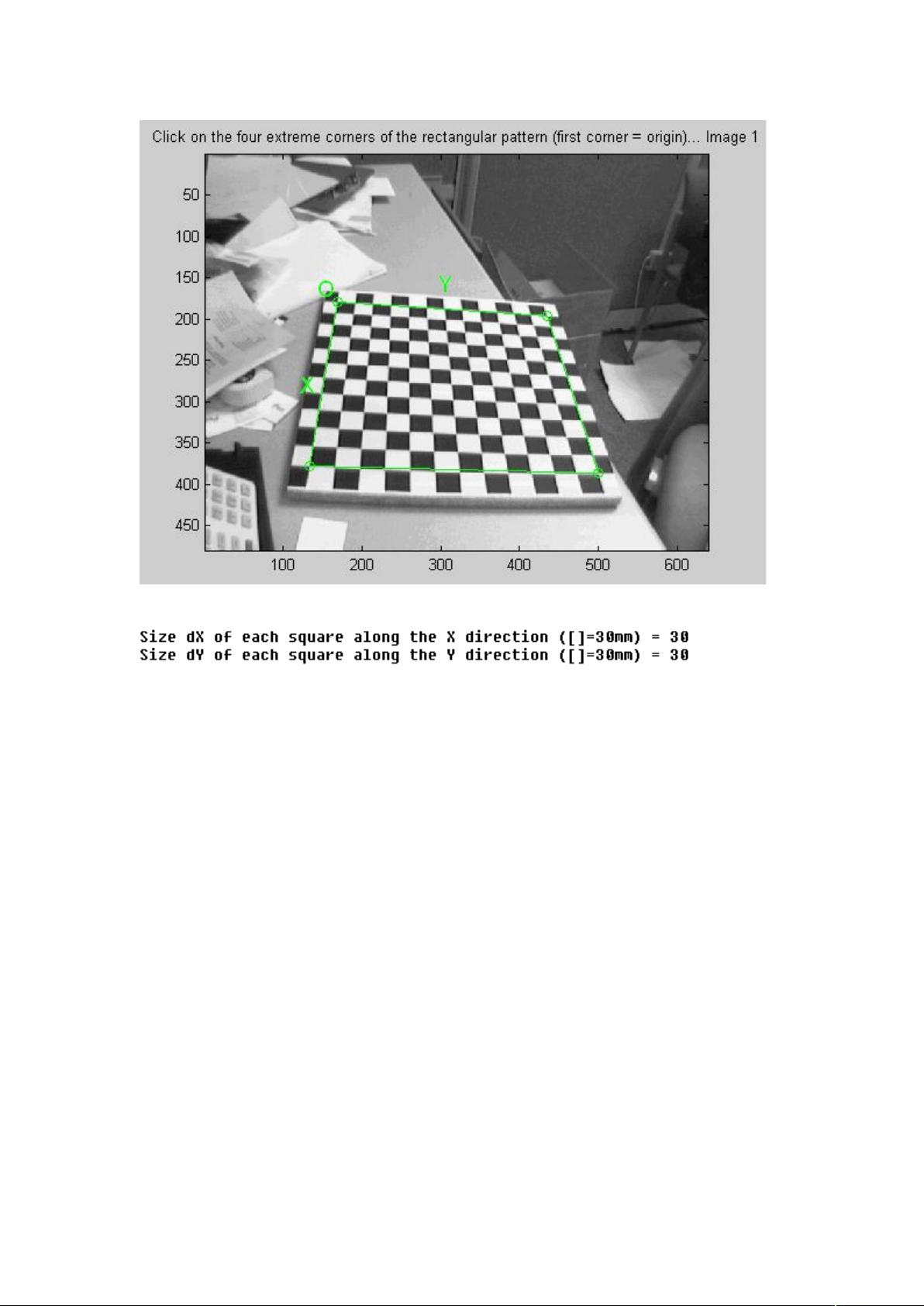
输入X和Y的dX和dY大小网格中的每平方(在这种情况下,dX = dY = 30毫米=默认值):
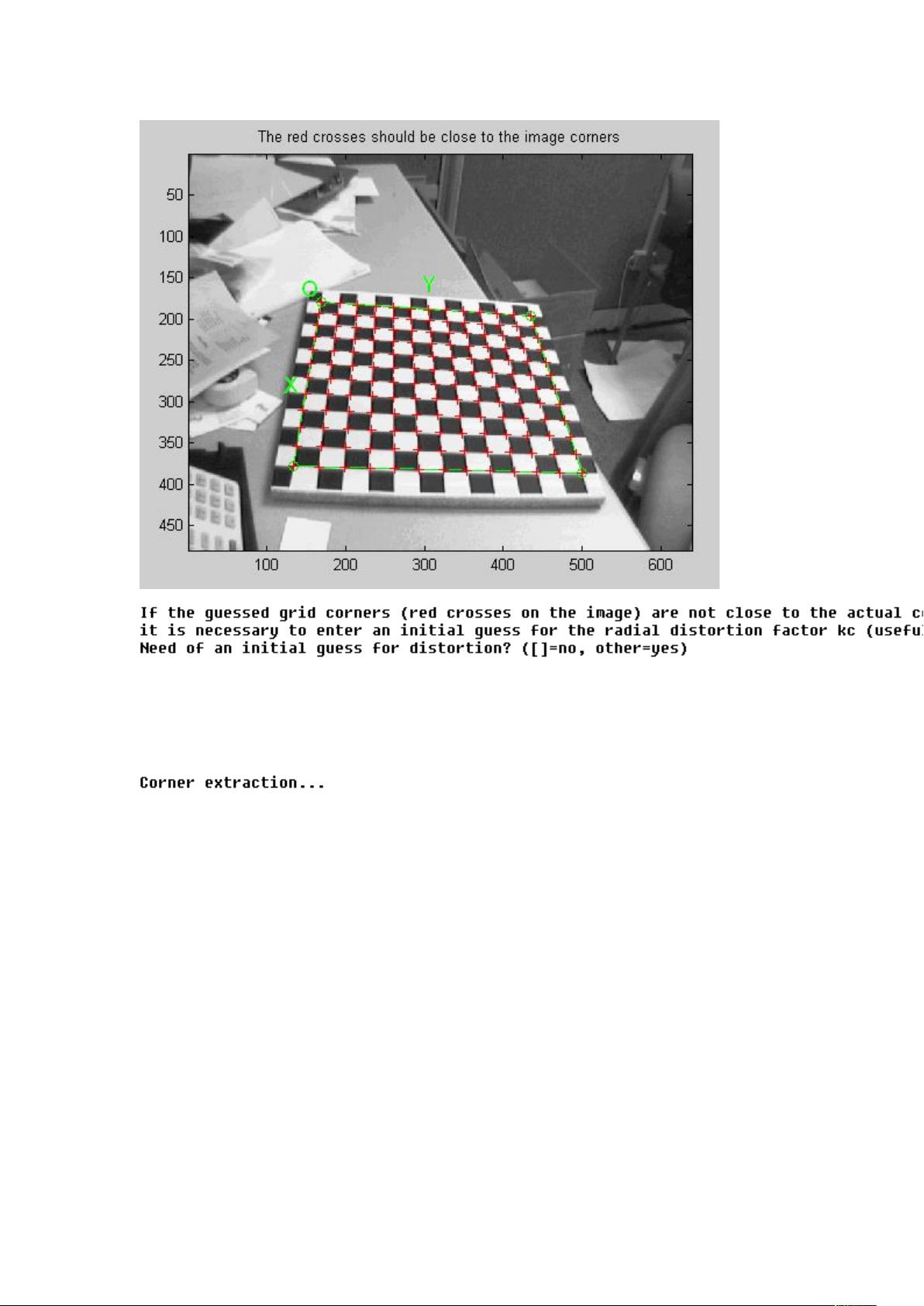
注意,您就可以按下“输入Enter”与一个空参数选择默认值。程序自动计算方块的数量在这两个维度,并显示
预测的网格无失真角落:
剩余43页未读,继续阅读
679 浏览量
128 浏览量
点击了解资源详情
261 浏览量
122 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
164 浏览量

豆豆200000
- 粉丝: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- vs2015环境下MFC多线程编程示例教程
- 实时掌握知乎热点:自动化爬取工具
- Everything文件搜索工具V1.4.1正式版发布,索引速度飞跃
- C++数据结构源代码解析与应用
- 掌握Firebug与Firepath:浏览器开发的利器
- Android UI界面绘制原理深度解析
- PHP常用方法整理:字符串处理与数组操作技巧
- IOS平台下实现WiFi Socket通信的方法
- Android 4.X 开发实战源代码详解手册
- Bootstrap布局示例演示与学习指南
- 官方已停服,获取Python 3.6.6 Windows安装包
- 多线程C++实现的SFML和ImGui Mandelbrot集渲染器
- ScpToolkit v1.6.238.16010:电脑版PS3手柄驱动安装指南
- 快速获取FlexViewer源码包,免登录下载
- Redis Desktop Manager for Windows压缩版评测
- Delphi临时文件清理工具Clean_CompileFile
