YRC1000安装PROFINET CP1616基板步骤指南
需积分: 5 201 浏览量
更新于2024-06-16
收藏 6.79MB PDF 举报
"该文档是关于在YRC1000机器人控制器上安装PROFINET通信基板(CP1616基板)的操作指南,由YASKAWA Electric(CHINA)Corporation提供。内容包括基板的版本对应、安装步骤、以及通过示教器进行的配置设定。"
在YRC1000上安装PROFINET通信基板(CP1616基板)是一个关键任务,确保机器人系统能够通过PROFINET协议与其他设备进行高效通信。首先,安装前需确保CP1616基板的固件版本与YRC1000控制柜版本匹配。例如,YRC1000控制柜版本在YAS3.00.00A-00之前的,应使用CP1616版本2.6;而YAS3.00.00A-00及以后的版本,则需匹配CP1616版本2.8。
安装步骤如下:
1. 准备工作:确保拥有一个CP1616基板,一个具有PCI插槽的中继卡JANCD-ABB04-E,以及一个十字螺丝刀。
2. 插入基板:将CP1616基板插入中继卡的PCI插槽,并用螺丝刀固定。
3. 安装到控制柜:确认控制柜电源关闭,打开柜门,将装有基板的中继卡正确插入控制柜内,然后拧紧3个安装螺栓。
在硬件安装完成后,接下来是软件配置:
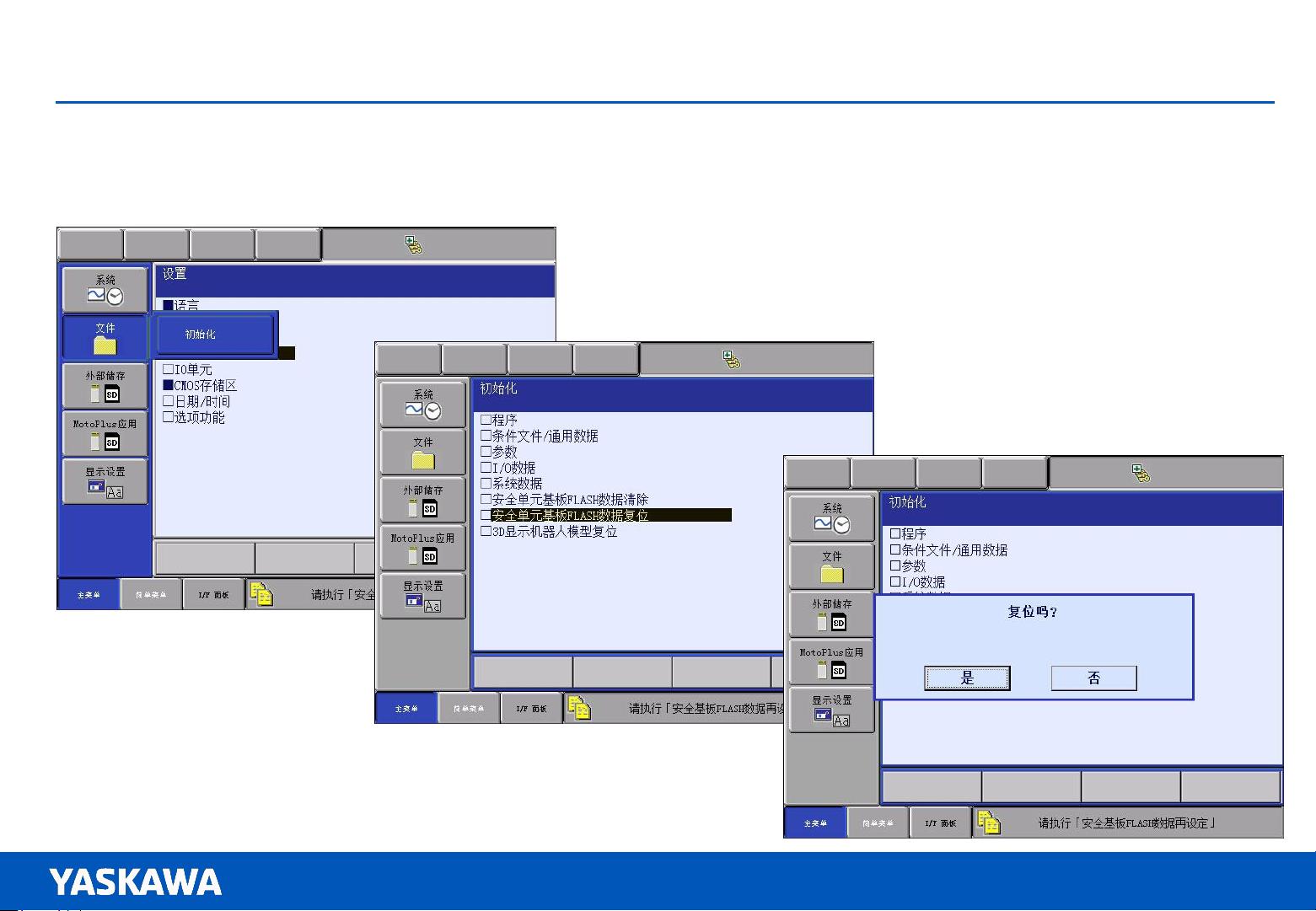
1. 进入维护模式:同时按下示教器上的【主菜单】键,开机后进入维护模式,进一步进入安全模式。
2. 设定选项基板:在示教器的主菜单中选择【系统】,然后进入【设置】,选择【选项基板】。
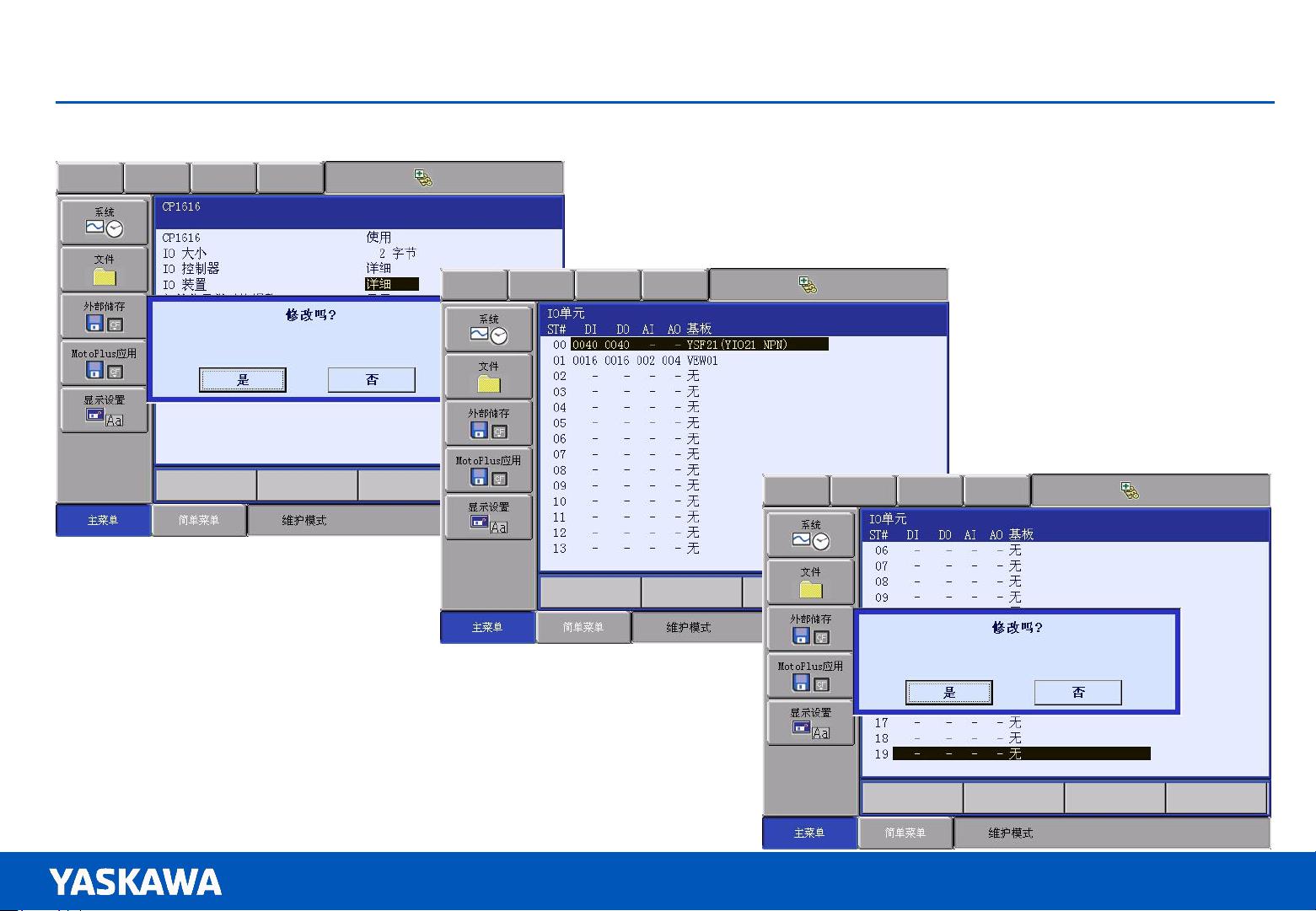
3. 启用CP1616基板:在基板列表中选择【CP1616】,设定为【使用】状态。
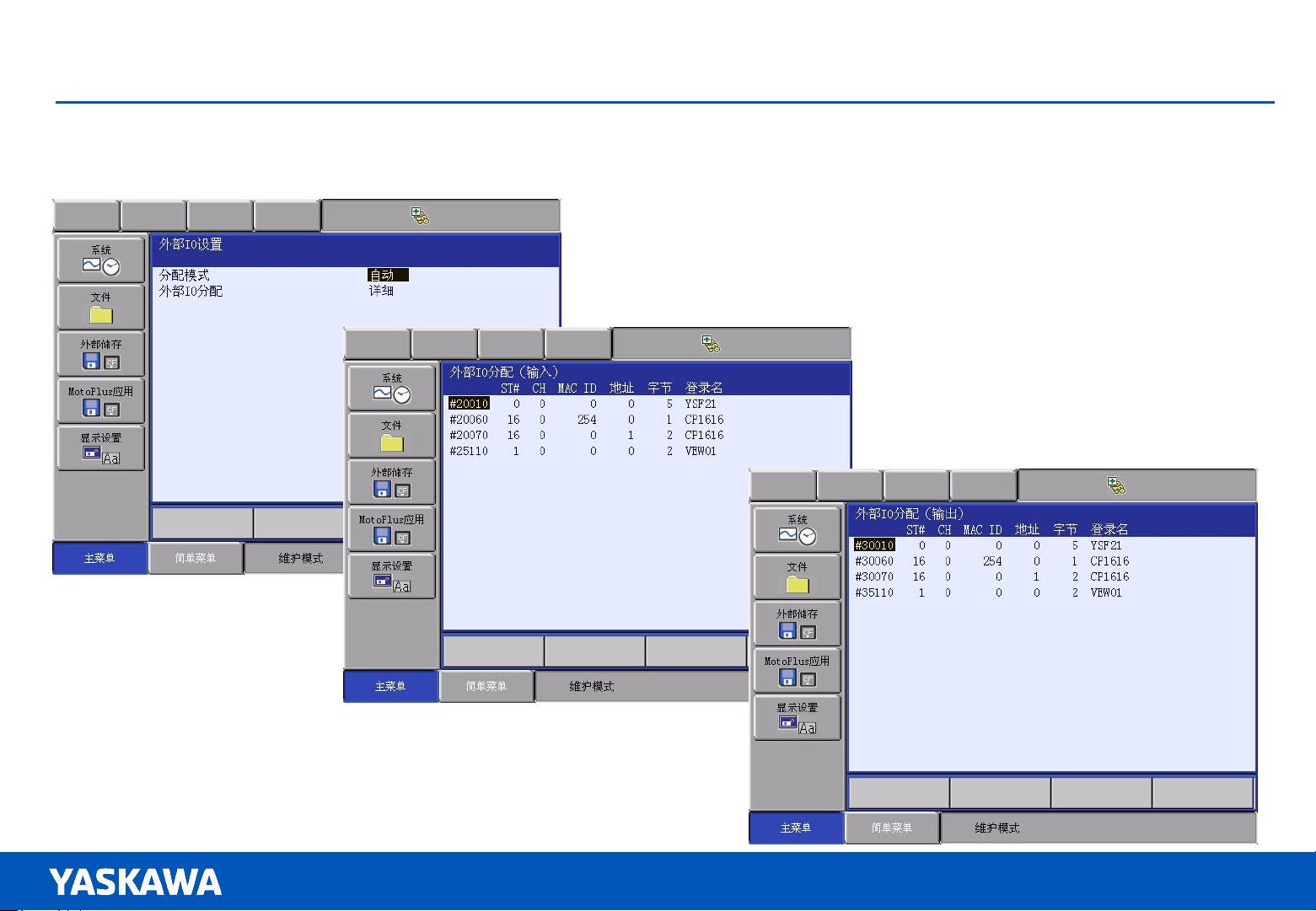
4. IO模块配置:如果基板作为从站,需进入【IO装置】的详细设定。对于控制柜版本在YAS3.00.00A-00之前的,仅作为从站时选择【有效(无Migration)】,同时作为主站和从站时选择【有效(有Migration)】,并分配IO大小,最后按【回车键】确认。
这个过程确保了PROFINET通信的正常运行,允许YRC1000与PLC、其他机器人或I/O设备进行有效的数据交换。正确配置后,YRC1000能够无缝集成到PROFINET网络中,实现自动化生产线的高效协同作业。
© YASKAWA Electric (CHINA) Corporation
2.6按回车键确认更改项目,多次按回车键显示IO单元画面的后续,确认修改。
在示教器上设定选配基板和IO模块
剩余57页未读,继续阅读
点击了解资源详情
点击了解资源详情
593 浏览量
2024-02-21 上传
2023-08-15 上传
201 浏览量
593 浏览量
357 浏览量
2023-08-15 上传

rocwangdp
- 粉丝: 0
- 资源: 14
 我的内容管理
展开
我的内容管理
展开







最新资源
- 驱动器:用于数据存储和传输的android应用
- wheather-kotlin-app:应用Kotlin博物馆
- cse427:uw的计算生物学课程
- bash入门学习实例
- spacedesk安装包
- RTSP拉流软件显示.zip
- ReCapProject:租车计划
- spooky-authors-identification:该存储库介绍了我们在哥伦比亚大学IEOR 4523数据分析课程的背景下实现的项目中的工作
- 在WPF MVVM应用程序中使用IValueConverter选择UserControl / View
- 一次性电子邮件域
- 教育核算点财务管理考核方案
- USIM_Explorer.rar
- ucsf_www.ucsf.edu_tests:www.ucsf.edu 重新设计的测试场景
- DummyWebApp
- C语言期末作业——民航票务系统
- 电信设备-基于改进蚁群AODV协议的多机器人通信组网方法.zip
