ICESat-2 ATL06: Land Ice Height Processing Algorithm Theoretical...
版权申诉
138 浏览量
更新于2024-07-07
1
收藏 4.6MB PDF 举报
"ICESAT-2_ATL06_ATBD_r004.pdf" 是一个关于ICESat-2(冰、云和陆地高度卫星-2)任务的算法理论基础文档,专注于陆地冰沿轨道高度产品(ATL06)。此文档由NASA的戈达德太空飞行中心的专家团队编写,详细阐述了陆地冰高程处理算法的理论基础,以及由此任务生成的产品。
ICESat-2是美国国家航空航天局(NASA)的一个项目,旨在通过其先进的地形激光测高仪系统(ATLAS)精确测量全球冰层、云层和陆地的海拔变化。ATLAS不仅包含了科学算法软件(ASAS)和调度与数据管理系统(SDMS),还支持在ICESat-2空间飞船上进行的数据处理。ASAS能够生成从0级到4级的标准数据产品,同时提供产品质量评估和元数据信息。
这篇文档的核心内容是陆地冰高程产品(ATL06)的算法理论。它涵盖了产品提供的各个参数的描述,以及在衍生这些产品时使用的辅助地球物理参数。文档的目的是为了使科学家和研究人员理解ICESat-2如何处理和解析来自ATLAS的数据,以得出准确的冰层高度信息。
高度产品ATL06提供了沿卫星轨道的陆地冰层的详细高程数据,这些数据对于监测冰川消融、极地冰盖的变化以及全球海平面上升的研究至关重要。文档的摘要部分强调,这份资料详细解释了陆地冰高程处理算法的原理,以及每个产品附带的参数和辅助参数的使用,这些参数用于计算最终的高程结果。
此外,该文档可能还涵盖了数据质量控制方法、误差分析、数据处理流程,以及如何将ATLAS的脉冲激光测距数据转换为高精度的地表高度信息。对于从事冰川学、气候学、地球物理学等领域研究的科学家,这个文档是理解ICESat-2数据的关键参考资料,也是进行数据分析和建模的重要工具。
ICESat-2_ATL06_ATBD_r004.pdf是ICESat-2项目中陆地冰高程测量技术的详尽指南,它揭示了复杂的卫星数据处理背后的科学原理,为冰层研究提供了坚实的基础。

ICESat-2 Algorithm Theoretical Basis Document for Land Ice Height (ATL06)
Release 004
4
2.2 Physical Basis of Measurements
83
2.2.1 Height retrieval over approximately planar surfaces
84
Light from the ATLAS lasers reaches the earth’s surface as flat disks of down-traveling photons,
85
approximately 50 cm in vertical extent, and spread over about 17 m horizontally. On land ice,
86
photons are scattered once, or many times, by snow and ice grains, into every direction,
87
including towards the satellite; a tiny fraction return to the ATLAS telescope’s focal plane, and a
88
few of these are counted by the detector electronics and recorded as Photon Events (PEs). Over
89
the vast majority of the earth’s land ice, the surface is smooth, with small (single-degree)
90
variations in surface slopes at scales less than a few hundred meters. This allows us to
91
approximate the surface profiles measured by ATLAS with short linear segments. We aggregate
92
PEs received by ATLAS into 50% overlapping along-track segments of a fixed length (40 m),
93
whose centers are 20 m apart. We then fit these PEs with sloping line segments; for each
94
segment, we estimate both the along-track slope and the height at the center of the segment.
95
When both beams in a pair provide height measurements, we also calculate the across-track
96
slope for the pair. Any height variation not captured by this fitting process will be treated as
97
surface roughness.
98
The time variation in surface height is determined by fitting a simple spatial function to the
99
heights from multiple repeat measurements, and using this function to correct the measurements
100
for the height variations caused by spatial sampling of sloped and curving surfaces. This
101
function is fit to the subset of the repeat measurements that we assess to be of the highest quality,
102
but corrected height estimates are provided for all available repeats, and data-quality metrics are
103
provided to allow users to decide which heights to use.
104
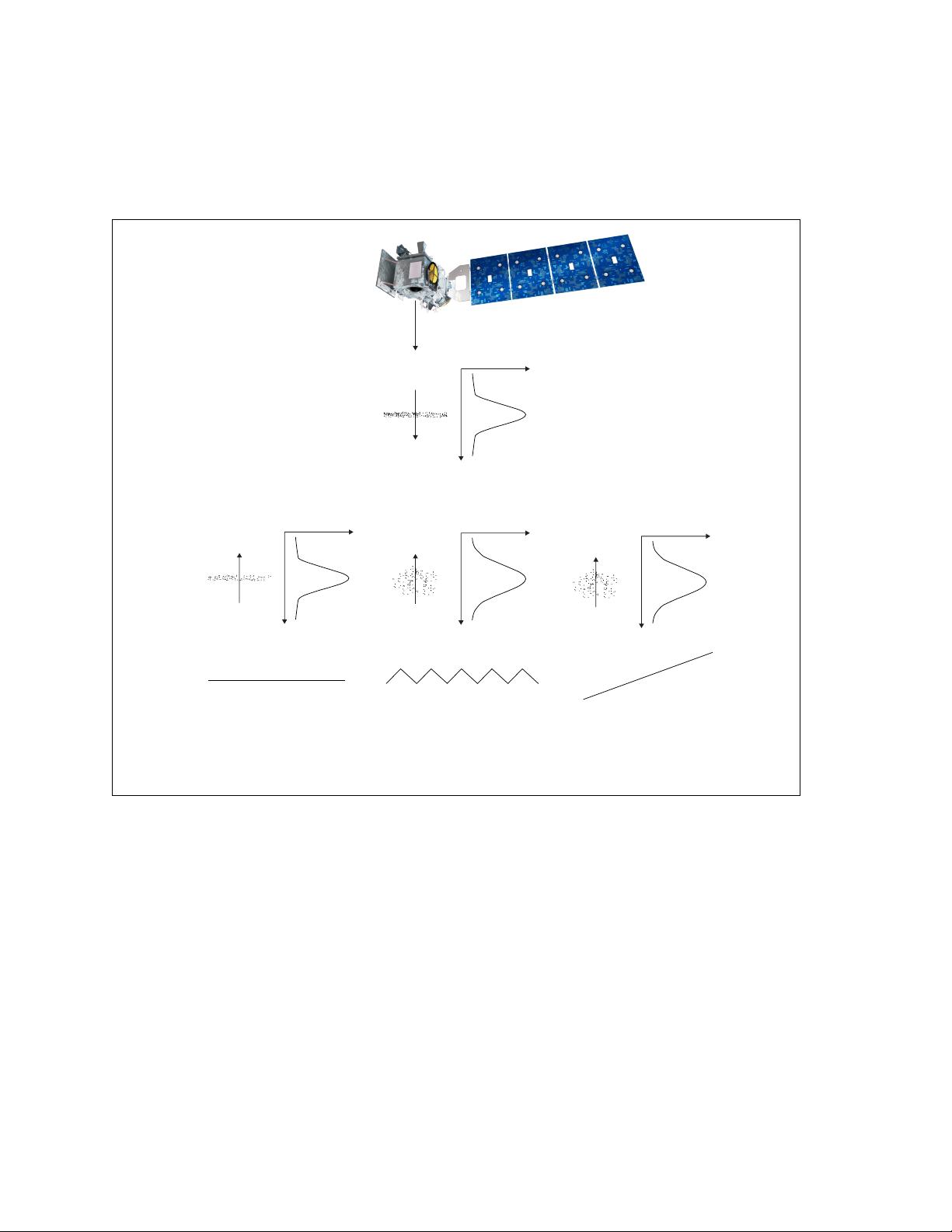
2.2.2 Effects of surface slope and roughness
105
Figure 2-2 shows how slope and roughness contribute to the shape of the return pulse. For many
106
areas of glaciers, the ground may be treated as a rough planar surface, and the laser pulse as
107
having a Gaussian distribution in space, with intensity falling to 1/e
2
of its peak value over a
108
distance W/2. The laser pulses also have an approximate Gaussian distribution in time, with
109
standard deviation
s
tx
. If the incident beam is not parallel to the surface normal, photons from the
110
edge of the footprint farthest from the satellite will be delayed relative to photons from the edge
111
nearest the satellite. At the same time, a rough surface will yield early photons and late photons,
112
further spreading the returned photons. If the angle between the beam and the surface normal is
113
j, and the surface height within the footprint has a Gaussian distribution with RMS deviation R
114
relative to the plane of the surface, then the measured temporal distribution of the returned
115
photons will be Gaussian as well (Yi & Bentley, 1999), with a temporal standard deviation equal
116
to the quadratic sum of the spreads due to the transmitted pulse, the surface slope, and the
117
roughness:
118
!
!
"
#
!
"#
$
$
%
$%
!"#$
&
&'()
*
$
$
%
$!
&'
*
$
+
(/$
1
For ATLAS,
!
*+,-
is expected to be around 4.25 m (one quarter of W), and s
tx
around 0.68 ns,
119
corresponding to a FWHM (Full Width at Half Maximum) of 1.6 ns, so spreading due to sloping
120


剩余103页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-12-23 上传
2023-01-14 上传
2021-12-23 上传
2021-12-23 上传
2021-12-23 上传
2021-12-23 上传

空中旋转篮球
- 粉丝: 5576
- 资源: 47
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入了解Django框架:Python中的网站开发利器
- Spring Boot集成框架示例:深入理解与实践
- 52pojie.cn捷速OCR文字识别工具实用评测
- Unity实现动态水体涟漪效果教程
- Vue.js项目实践:饭否每日精选日历Web版开发记
- Bootbox:用Bootstrap实现JavaScript对话框新体验
- AlarStudios:Swift开发教程及资源分享
- 《火影忍者》主题新标签页壁纸:每日更新与自定义天气
- 海康视频H5player简易演示教程
- -roll20脚本开发指南:探索roll20-master包-
- Xfce ClassicLooks复古主题更新,统一Linux/FreeBSD外观
- 自建物理引擎学习刚体动力学模拟
- Python小波变换工具包pywt的使用与实例
- 批发网导航程序:自定义模板与分类标签
- 创建交互式钢琴键效果的JavaScript库
- AndroidSunat应用开发技术栈及推介会议
