单片机STC89C51驱动的智能玩具车设计与实现
需积分: 9 55 浏览量
更新于2024-07-01
收藏 1.32MB DOC 举报
"这篇文档是关于基于单片机的智能玩具车设计,主要涉及STC89C51单片机在智能玩具车中的应用,包括硬件和软件的设计与实现,以及利用各种传感器进行实时监控和避障等功能。"
本文档详细介绍了如何设计一款基于单片机的智能玩具车,其核心是STC89C51单片机,这是一种广泛应用的8位微处理器。智能玩具车不仅具备基本的前进、后退、转弯功能,还集成了显示运行状态、里程计数和报警系统,显著提升了玩具车的智能化程度。
硬件设计部分包括以下几个关键组件:
1. **控制器**:STC89C51单片机作为核心,负责接收和处理传感器数据,以及控制车辆动作。
2. **信号检测电路**:利用光电传感器、红外传感器和超声波传感器等,实时监测玩具车的速度、位置和运行状态。
3. **避障电路**:通过传感器检测障碍物,确保小车能自动避开前方障碍物。
4. **电机驱动电路**:控制玩具车的前进、后退、加速和减速。
5. **显示电路**:用于显示运行状态、里程(圈数)等信息。
6. **电源电路**:为整个系统提供稳定电源。
软件设计方面,主要任务是编写控制程序,让单片机根据传感器输入的数据做出相应决策,如调整行驶方向、速度和执行避障动作。此外,程序还包括语音控制功能,使用户可以通过语音指令控制小车,增加了互动性。
智能玩具车的具体功能如下:
1. **实时显示温度**:可能通过集成温度传感器来实现,提供环境温度信息。
2. **里程显示**:记录玩具车的行驶距离,可作为比赛或娱乐的参考。
3. **语音控制**:通过语音识别技术,用户可以口述指令来控制小车。
4. **自动循迹**:通过传感器识别路径,使小车能沿着预设路线行驶。
5. **避障能力**:结合传感器数据,自动避开障碍物,确保安全行驶。
6. **速度调节**:根据环境或用户需求,自动调整行驶速度。
7. **精确停车**:通过精确控制,使小车能够在指定位置停稳。
关键词涵盖了“智能”、“玩具电动车”、“单片机”和“软件设计”,表明了这篇文档的研究重点在于将先进的控制技术应用于玩具领域,提升玩具的趣味性和教育价值。这样的智能玩具车设计不仅对儿童具有吸引力,也为电子爱好者和教育工作者提供了实践和学习平台,有助于推动STEM教育的发展。

10 / 69
传统数码管具有低能耗、低损耗、低压、长寿命、耐老化、防晒、防潮、防
火、防高(低)温的特点;对外界环境要求低,易于维护;同时其精度比较高,
精确可靠,操作简单,程序编写容易,资源占用少。本设计要求显示的容较多,
如果利用传统数码管来显示,则需要好几块数码管,这样占用单片机很多的 I/O
口,并且不够美观,也不易区分各块数码管显示的是什么容。所以,该方案不被
采用。数码管完全可用来显示已行驶过的路程,且数码管亮度大,夜间观测也比
较方便,所以数码管在一般场合是首选,但是数码管只能显示数字,发挥的空间
比较窄。所以不采用此方案。
方案二:采用液晶显示屏(LCD)显示时间和路程。
液晶显示器具有功耗低、无辐射危险、平面直角显示以与影像稳定等,可视
面积大,画面效果好,也可以显示汉字,分辨率高,抗干扰能力强,显示容多等
特点。因此,只要用一块液晶显示器就可以显示设计要求的全部容。此外,液晶
显示器与单片机连接电路较简单,且占用的 I/O 口较少。基于以上分析,我们采
用该方案,用 LCD1602 进行显示。
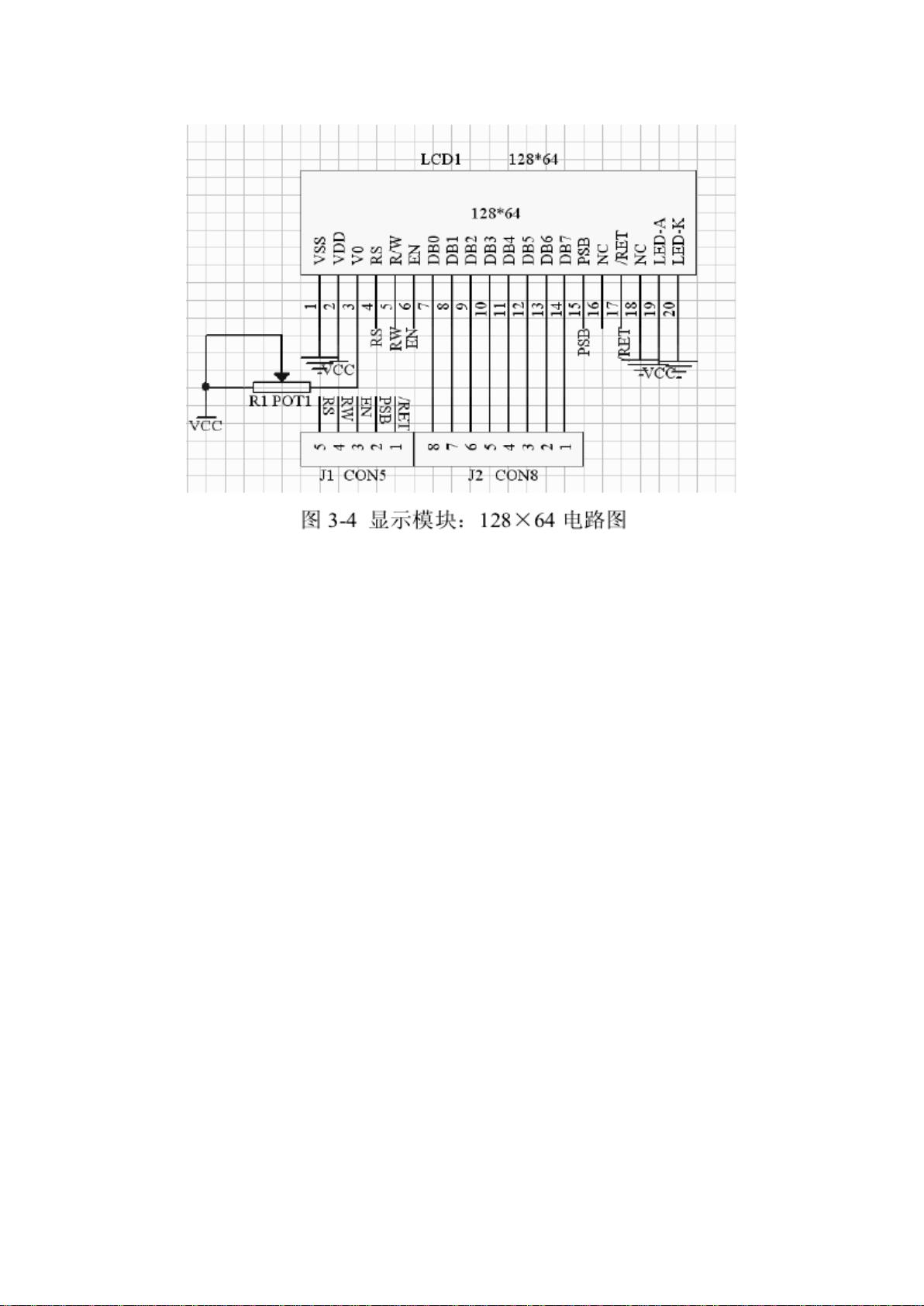
采用 128×64 的液晶屏作为显示器件,可以显示小车行驶的方向,小车行驶过的
路程,小车行驶过的时间等等,最重要的是液晶能够显示汉字,提供的信息非常
直观,故采用此方案。
其原理图如下所示:

剩余68页未读,继续阅读
2023-05-04 上传
2023-02-27 上传
2023-02-27 上传
2023-06-20 上传
2023-06-18 上传
2022-11-28 上传
2023-07-11 上传
2022-07-16 上传

智慧安全方案
- 粉丝: 3820
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- vagrant-puppet-template:适用于本地人偶的基本,空Vagrantfile
- workshop-osc-enum-2015:OSC 枚举工作坊 2015
- 2022最新大河抽奖盲盒运营版 - 完整开源版
- ODK-ClientInfo:DarkEden信息文件的类和JSON转换器的集合
- LMS-to-uPnP:将 UPnP 播放器与 LogitechMediaServer 集成
- 机房预约管理系统_机房预约管理系统_机房管理_
- 尝试不同的图像和矩阵,看看矩阵属性(例如秩和稳定秩)如何从空间域到傅里叶域发生变化matlab代码.zip
- NIKE运动鞋外贸商务网站模板
- annoyinglittleduck
- spingboot集成dubbo,配置多注册中心以及发布多版本服务
- mymail_pb11.5(收发邮件程序源码).zip
- android常用图片特效处理(实用1).zip
- matlab ISP仿真代码.zip
- TransferLearningToolchain:用于语义分割的转移学习工具链
- k近邻算法_K._KNN分类_
- matomo_docker:一个码头工人尝试Matomo
