高分辨率遥感影像道路提取的深度融合与模板优化方法
版权申诉
128 浏览量
更新于2024-06-27
收藏 2.76MB DOCX 举报
本文主要探讨了一种高分辨率遥感影像道路提取方法,针对当前高分二号、高景一号等国产亚米级卫星数据广泛应用的背景下,如何有效地更新道路信息的问题。传统的道路提取方法通常依赖于人工经验和特征设计,如几何特征、光谱纹理特征、拓扑特征和背景特征,常用的技术包括面向对象分析、路径形态学、模板匹配、动态轮廓模型和水平集模型[3-18]。这些方法虽然在特定情况下表现良好,但在面对空间异质性挑战,如道路曲率变化、遮挡、相似纹理地物分布不均等问题时,自动化程度有限。
相比之下,深度学习方法展现了强大的潜力,通过自动学习道路影像特征并预测像元级别的道路概率,显示出极高的稳定性和泛化能力[19-23]。然而,深度学习的成功在很大程度上依赖于高质量的训练样本,而这往往需要大量的人工标注,限制了其大规模应用到实际场景,如全国土地调查和农村公路普查中的自动化道路提取。
作为传统方法的一种,模板匹配因其在商业软件如ErdasEasytrace、FeatureAnalyst、EasyFeature中的广泛应用而成为高度成熟的道路提取手段。然而,模板匹配对道路几何纹理特征的依赖使其在空间异质性问题上显得较为脆弱,尽管它的人机交互性强能保证较高的提取精度,但自动化程度不高。
本文作者针对这些问题,提出了一种基于高分辨率遥感影像的道路提取新方法。这种方法从道路语义关系的角度出发,通过探索道路内外边缘与道路方向的相似性,构建出道路与非道路混合区域的处理策略,旨在提高自动化水平,同时保持较高的提取精度。这种创新的方法有望克服空间异质性带来的挑战,推动道路提取技术向更普适和实用的方向发展,降低信息采集成本,并可能在未来的地理信息系统(GIS)和自动驾驶等领域得到广泛应用。
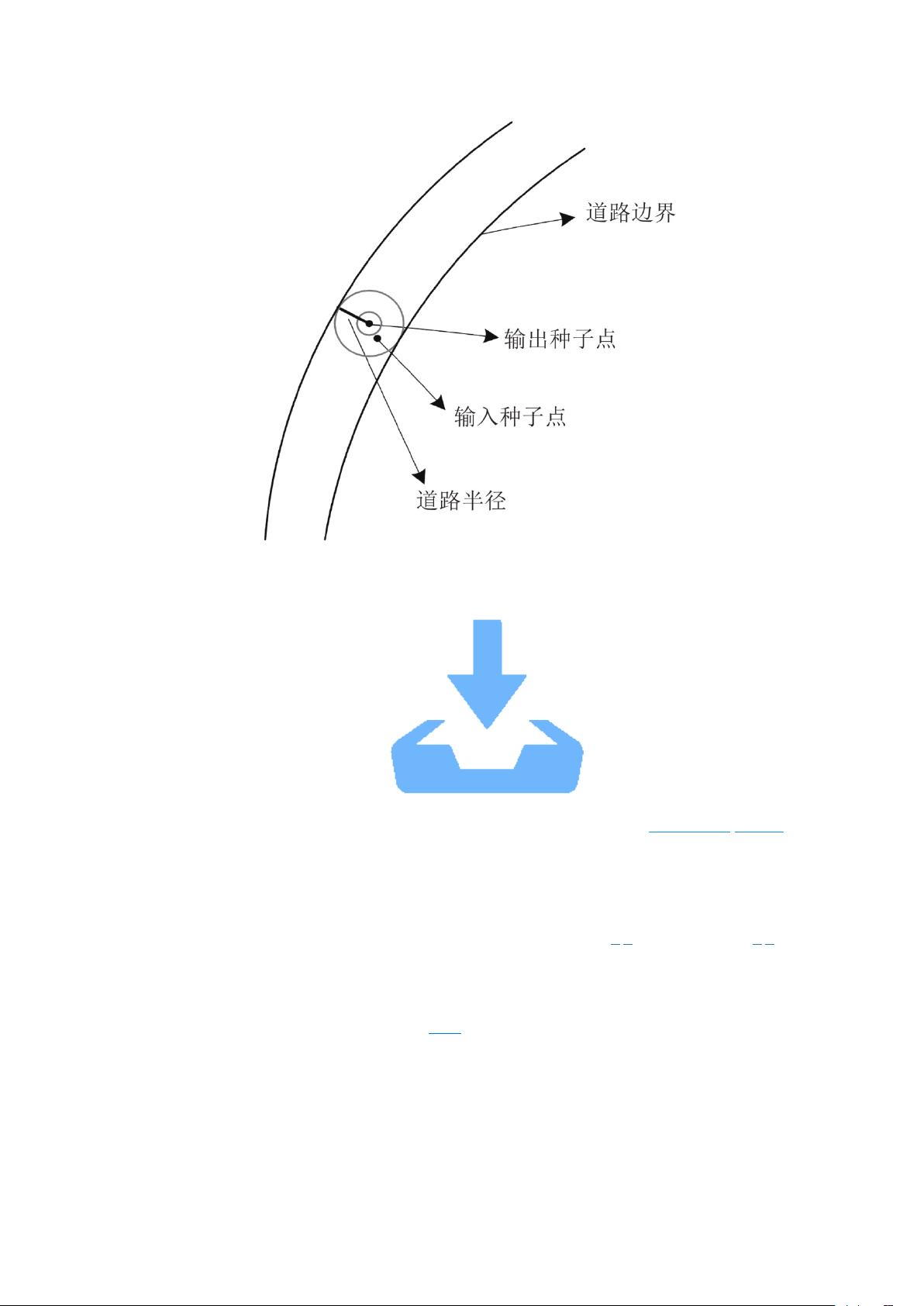
图 2 模板参数自适应提取
Fig. 2 Adaptive extraction of template parameters
下载: 全尺寸图片 幻灯片
1.1.2 跟踪方式确定
以道路中心点为起始点, 通过迭代跟踪的方式, 完成对道路种子点的提取, 这是模板匹
配获取道路种子点的常用方法. 常用的跟踪方式包括迭代内插方法
[27-28]
和双向迭代方法
[29-30]
.
双向迭代跟踪方法输入点需确定相邻两点, 具有方便快捷的优点, 但在跟踪过程中难以有效
控制跟踪方向, 易引发道路误提取的问题. 因此本文主要选取迭代内插方法进行匹配跟踪,
即通过起点与终点两点约束跟踪方向. 如图 3 所示, PSPS 和 PEPE 分别为起点和终点, PSiPSi
和 PEiPEi 分别为起点和终点方向的跟踪点, 虚线为跟踪过程中的动态方向约束线. 但是, 由
于种子点选取的严格要求, 道路起止点难以位于严格的道路尽头. 因此, 需要采用双向迭代
方法对另一侧跟踪点进行提取.
剩余18页未读,继续阅读
2023-04-12 上传
2023-02-23 上传
2023-02-23 上传
2023-02-23 上传
2023-02-23 上传
2021-09-20 上传
2022-11-29 上传

罗伯特之技术屋
- 粉丝: 4494
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
