MFFAKF降噪的MEMS惯导初始对准提升精度
7 浏览量
更新于2024-08-31
2
收藏 476KB PDF 举报
本文主要探讨了一种针对MEMS惯性器件输出精度较低引发的惯性导航系统(Inertial Navigation System, INS)初始对准误差问题的解决方案。传统的初始对准方法依赖于陀螺仪和加速度计,然而MEMS陀螺仪的低信噪比和较大漂移限制了其性能。为解决这个问题,研究人员提出了结合多遗忘因子自适应卡尔曼滤波(MultiForgettingFactorsAdaptiveKalmanFilter, MFFAKF)和磁强计辅助的间接粗对准策略。
MFFAKF被用来对加速度计和磁强计的原始数据进行预处理,通过多重遗忘因子调整不同的滤波通道,以抑制噪声并提高数据质量。这种方法能够有效地降低噪声的影响,进而提升姿态角解算的准确性,缩短对准所需的时间。这种方法的优点在于它能够在保持滤波精度的同时,根据新近信息动态调整权重,使得系统对噪声的处理更加灵活和高效。
磁强计辅助的间接粗对准技术利用磁强计的稳定输出作为辅助信息,通过构建3个正交的矢量,间接推算初始姿态,减少了传统方法中的直接姿态矩阵计算,进一步简化了计算负担。这样不仅提高了对准精度,还提高了整个系统的实用性。
实验结果显示,采用MFFAKF进行粗对准后的航向角精度已经满足了MEMS惯导系统对于粗对准的要求,证明了这种方法的有效性和实用性。这一研究成果对于提升MEMS惯导系统的整体性能,尤其是在低成本、轻量化应用中,具有重要意义。
本文的研究工作为MEMS惯导系统的初始对准提供了一个创新的解决方案,利用MFFAKF和磁强计的协同作用,优化了数据处理过程,从而实现更快速、更精确的对准,为实际应用提供了技术支持。
一种多遗忘因子自适应卡尔曼降噪的一种多遗忘因子自适应卡尔曼降噪的MEMS间接对准间接对准
针对MEMS惯性器件输出精度低导致惯导系统初始对准误差大问题,提出了一种先利用多遗忘因子自适应卡尔
曼(MFFAKF)对原始数据降噪处理后再采用磁强计辅助的MEMS间接粗对准的方法。该方法采用多重遗忘因子调
节不同的滤波通道对加速度计与磁强计传来的原始数据进行预处理后再进行姿态角解算,提高初始对准精度,
缩短对准时间。实验结果表明,采用MFFAKF得到的粗对准航向角精度满足MEMS惯导系统粗对准要求。
0 引言引言
MEMS惯性器件因具有低成本、轻重量、小体积、低功耗等优势在民用和军用方面都有广泛的应用
[1-3]
。传统的捷联惯导粗
对准方法是利用陀螺仪与加速度计信息通过解析法确定初始姿态矩阵
[4]
,而对于MEMS陀螺仪,其输出信噪比低、漂移大等问
题直接影响了捷联惯导系统初始对准的准确性和可行性。
捷联惯导系统因其重要的实用价值在国内外有许多专家学者也在研究其初始对准方式以期提高精度和对准速度。文献[5]提
出了一种磁强计辅助基于MEMS惯性器件SINS的初始对准方法,通过构造3个相互正交的向量间接对准,减小了计算量;文献
[6]提出基于线性最优控制的捷联惯导对准方法;文献[7]提出捷联惯导系统双矢量定姿的方法。基于以上研究,本文提出一种
多遗忘因子自适应卡尔曼滤波(Multi Forgetting Factors Adaptive Kalman Filter, MFFAKF)的MEMS间接粗对准方法,在对加
速度计和磁力计数据进行优化的同时通过合理地构造正交矢量减小初始对准时的姿态角计算量,以提高对准精度和对准速度,
并对该方法进行了分析验证。
1 磁辅助间接粗对准磁辅助间接粗对准
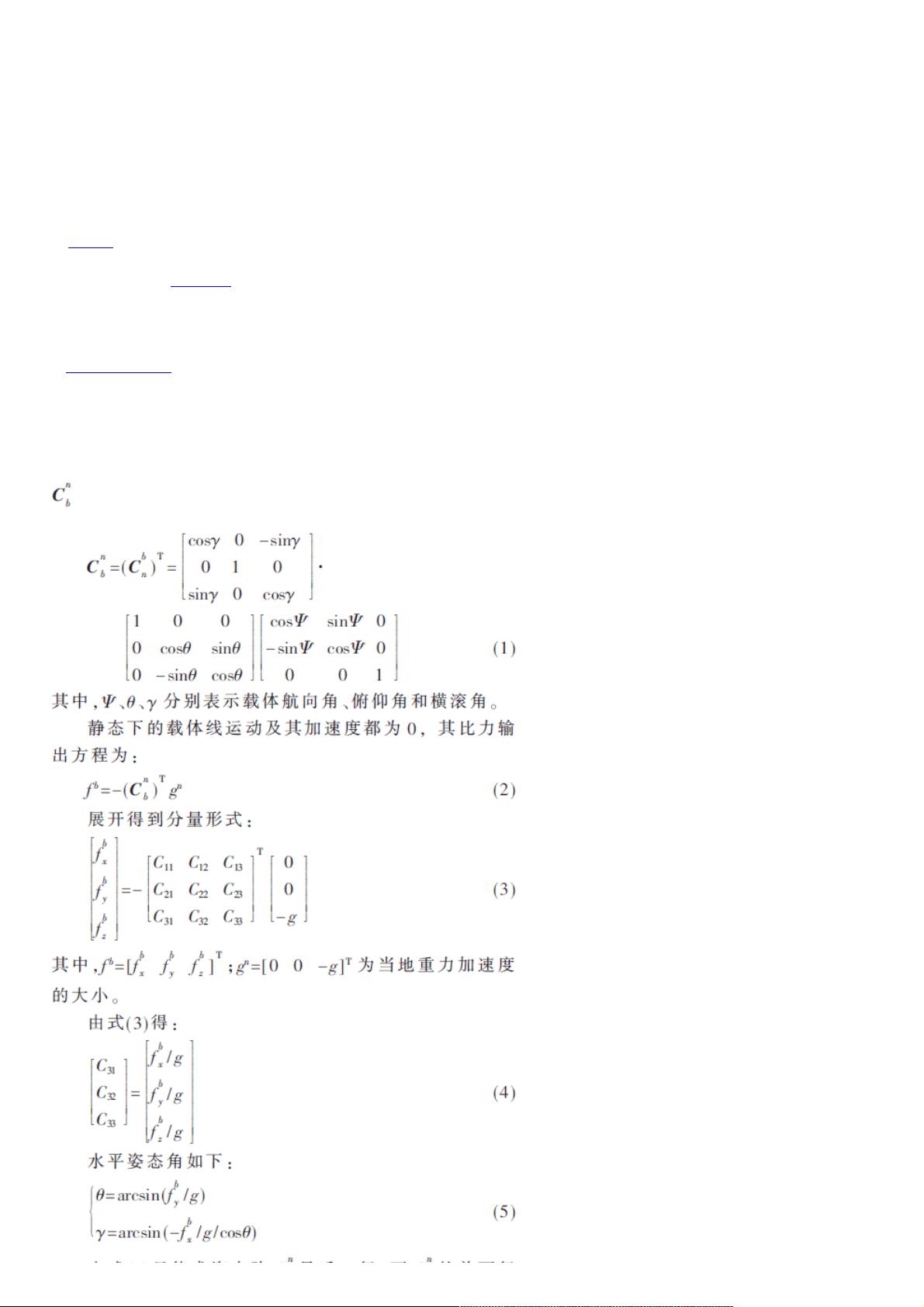
MEMS惯导系统在进入导航状态之前,需要进行初始对准,即载体坐标系(b系)转换到导航坐标系(n系)的初始姿态矩阵
:
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-28 上传
2021-09-28 上传

weixin_38589774
- 粉丝: 4
- 资源: 952
 我的内容管理
展开
我的内容管理
展开







最新资源
- node-silverpop:轻松访问Silverpop Engage API的Node.js实现
- 最小宽度网格图绘制算法研究
- 多数据源事务解决方案:统一管理单应用中的多数据库
- 利用Next.js匿名浏览Reddit子板块图片
- SpringBoot+H5官网模板,覆盖多种网页资源播放
- Gitshots-server:简化开源贡献的提交记录服务
- Scrapy-Dash工具:轻松生成Scrapy文档集
- Node.js v18.12.0发布,优化Linux PPC64LE服务器性能
- 蚂蚁设计专业版快速使用指南与环境配置
- Vue.js 2.3.4源码解读及开发环境配置指南
- LDBase:Lazarus开发者的dbf数据库管理开源工具
- 高效部署WordPress的VENISON脚本教程
- Saffron Bahraman-crx插件:控制产品线的栽培与培养
- Gitpod中运行前后端应用程序的指南
- Node.js v20.3.0新版本发布 - 开源跨平台JavaScript环境
- 掌握非线性方程根的迭代求解-Matlab方法实现
