Matlab平台下的PUMA560工业机器人运动学与雅克比矩阵研究
版权申诉
工业机器人课程设计是现代科技教育中一门综合性和实践性极强的课程,它将机械工程、电子工程、控制理论与计算机科学等多个领域的知识紧密结合起来。本研究聚焦于PUMA560这款经典的关节式工业机器人,它是Unimation公司于20世纪70年代开发的一款多关节机器人,以其六关节结构和广泛应用在制造业中的精密操作而闻名。
在这个课程设计中,Matlab软件被选为工具,因为其强大的数值计算能力和图形化环境,能够有效地处理复杂的机器人运动学问题。运动学是机器人学的基础部分,主要研究机器人的运动原理和运动轨迹,包括正解(forward kinematics)和逆解(inverse kinematics)。正解指的是从关节角度(angles)推算出末端执行器(end effector)在空间中的位置和姿态;逆解则是反之,从末端位置和姿态反推出关节角度。这两个问题在实际应用中至关重要,例如机器人路径规划和精确定位。
雅可比矩阵(Jacobian matrix)是解决逆解问题的关键数学工具,它将末端执行器的速度或加速度转换为关节速度,有助于理解和控制机器人的动力学行为。通过微分变换法和矢量积法(differential transformation method and vector product transformation),研究人员可以有效地计算出PUMA560的雅可比矩阵,这对于实现精确控制和运动规划至关重要。
PUMA560的六个关节分别对应不同的旋转自由度,这使得它在制造业中能够完成精细且灵活的动作,如装配、焊接、搬运等任务。然而,随着技术的发展,对工业机器人的精度和效率要求越来越高,这就需要在设计和编程过程中充分考虑运动学模型的准确性和计算效率。
该课程设计不仅让学生了解了工业机器人理论,如PUMA560的运动学模型和雅可比矩阵,还提供了实际操作和编程经验,通过Matlab工具优化求解过程,提升了他们分析和解决问题的能力。这不仅对未来的工业界工作者,如工程师和技术专家,具有重要价值,也促进了机器人技术的持续发展和创新。
PUMA560 机器人简介
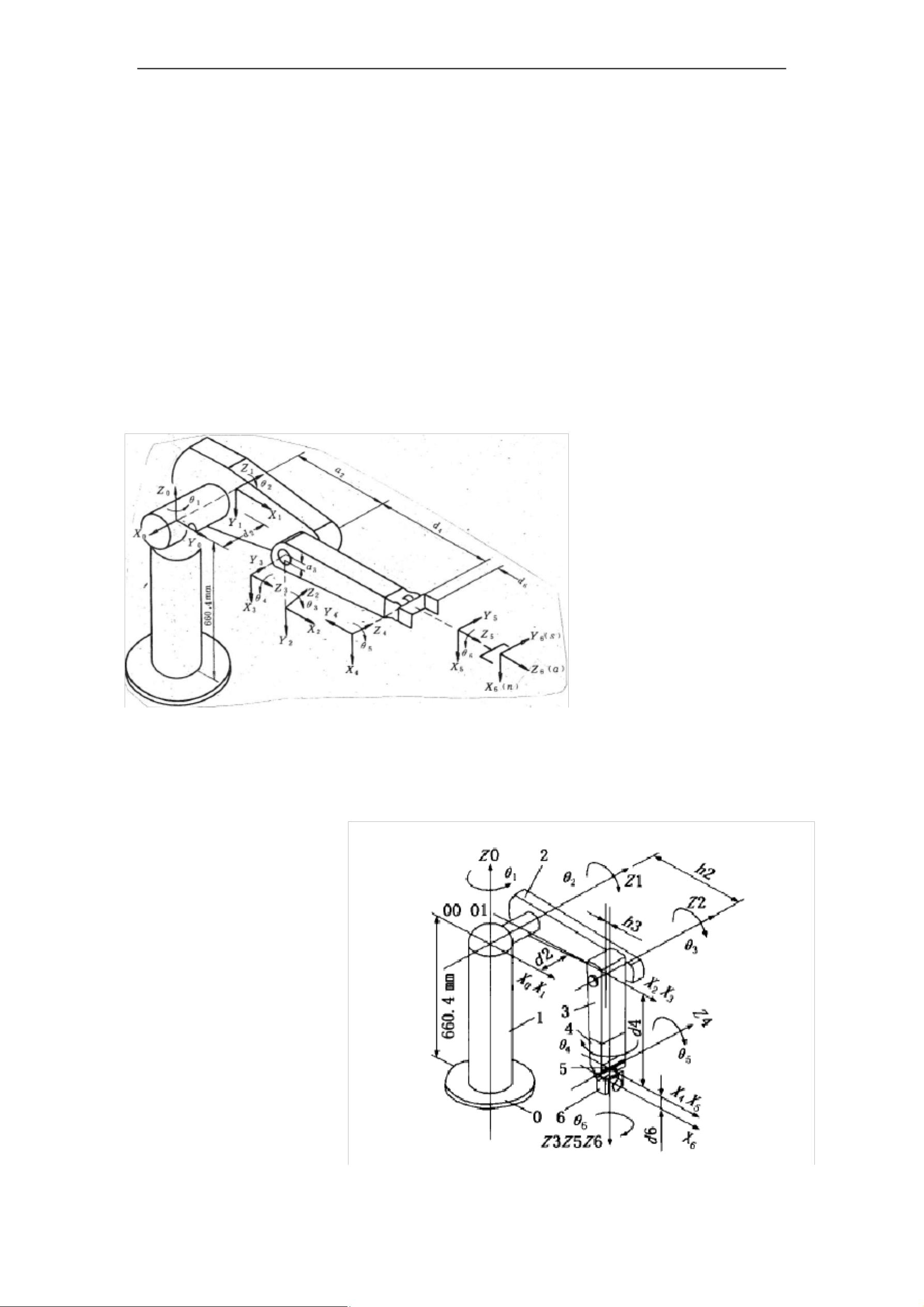
PUMA560 是属于关节式机器人,6 个关节都是转动关节,如图 1—1 所
示,前三个关节确定手腕参考点的位置,后三个关节确定手腕的方位。和大多
数工业机器人一样,后三个关节轴线交于一点。该点选作为手腕参考点,也选
作为{4}、{5}、{6}的原点。关节一的轴线为垂直方向,关节 2 和关节 3 的轴线
为水平,且平行,距离
为
a
2
。关节 1 和关节 2
的轴线垂直相交,关节 3
和关节 4 的轴线垂直交
错。距离为
a
3
。各个连
杆坐标系如图 1—1 所
示,相应的连杆参数列
于表 1—2 中。其中,
a
2
431.8
mm
,
a
3
20.32mm
,
d
2
149.09mm
,
d
3
433.07mm
。
在更进一步了解
PUMA560 机器人的转
动角度问题时,我们先
来定义一下 PUMA560
机器人的初始位姿。首
先,定义机器人的初始位
置.取大臂处于某一朝向
剩余21页未读,继续阅读
点击了解资源详情
点击了解资源详情
1485 浏览量
223 浏览量
2021-08-14 上传
2021-09-27 上传
2021-10-05 上传
2022-03-02 上传
2021-08-14 上传

想要offer
- 粉丝: 4087
 我的内容管理
展开
我的内容管理
展开







最新资源
- 安装Oracle必备:unixODBC-2.2.11-7.1.x86_64.rpm
- Spring Boot与Camel XML聚合快速入门教程
- React开发新工具:可拖动、可调整大小的窗口组件
- vlfeat-0.9.14 图像处理库深度解析
- Selenium自动化测试工具深度解析
- ASP.NET房产中介系统:房源信息发布与查询平台
- SuperScan4.1扫描工具深度解析
- 深入解析dede 3.5 Delphi反编译技术
- 深入理解ARM体系结构及编程技巧
- TcpEngine_0_8_0:网络协议模拟与单元测试工具
- Java EE实践项目:在线商城系统演示
- 打造苹果风格的Android ListView实现与下拉刷新
- 黑色质感个人徒步旅行HTML5项目源代码包
- Nuxt.js集成Vuetify模块教程
- ASP.NET+SQL多媒体教室管理系统设计实现
- 西北工业大学嵌入式系统课程PPT汇总
