基于DSP的新型开关磁阻电机伺服传动系统优化
需积分: 9 30 浏览量
更新于2024-09-13
收藏 272KB PDF 举报
本文主要探讨了利用数字信号处理器(DSP)控制的开关磁阻电机(SRM)在伺服传动系统中的应用。SRM作为一种结构紧凑、性价比高且运行稳定的电机,其开关磁阻驱动系统(SRD)在调速性能上表现出色,能够实现宽广的调速范围和灵活的转向控制。文章首先介绍了SRM的基本原理和优点,包括快速启动、大扭矩调节范围、直接传动带来的成本节省和性能提升。
在本文的创新部分,作者针对传统DTC(直接转矩控制)中存在积分器导致直流偏置累积的问题,提出了一个改进的定子磁链观测方法。这个方法采用了层叠式可编程低通滤波器的改进设计,通过调整滤波器环节和幅值补偿环节的顺序,显著提升了系统在低速下的动态性能。此外,文章还引入了PI调节器替换传统的转矩滞环比较器,以及磁链误差比例限幅控制器替代磁链滞环比较器,这些改变构成了一套改进的直接转矩控制系统。
值得注意的是,系统采用电流斩波控制策略,结合DSP的强大计算能力,对系统软硬件进行了优化设计。这种设计使得该伺服传动系统能够高效、精确地控制SRM,特别是在伺服应用中,如机器人关节伺服,相比于直流和交流伺服电机,SRM在性能、体积和成本方面更具优势。
这篇文章深入研究了基于DSP的开关磁阻电机伺服传动系统的关键技术,重点在于提高磁链观测精度、改善动态响应和增强控制算法,以满足现代工业自动化和机器人技术对高性能、低成本伺服系统的需求。
《中小型电机》2003.30(1)
DsP控制的开关磁阻电机伺服传动系统
35
,vvvv、,v、,、
l蠢一鼻■妒f;
~^^^^^^^,
DsP控制的开关磁阻
电机伺服传动系统
中国矿业大学(徐州市,221008)
张东
陈昊朱艺锋
张东
1977年8月
摘要
本文研究了以三相(12,8)开关磁阻电动机为执行对象的一种新型
生,现为中国矿业大学
伺服传动系统。系统采用电流斩波控裁策略,在基于DsP控制的基础上,进住
电力电子与电力传动专
了系统软硬件设计。
1M1三P,业在读硕士,研究方向
关■词
开关磁阻电动机数字信号处理器伺服传动系统
…、7…
为新型电机及其控制系
Switched
Rehlc切蛐∞MOtor
Ser、协
Drive
Based
on
DSP
Zl-a雌D0哩,ChenH舯,Zhu
YifeI曜
Ab时喇:Th8
pape。present8
a
new
sewo
d^ve
sy8tem
which
ad叩ts
a
IhTee
pha8e
sw沁hed州uctance
motor(12,8)as
the
execulive
objecI.n.e
cumnt
ch叩ping
contf。l
(ccc)strategy
is
ad叩ted.11le
soflware且Ild山e
harrlware
oflhe
system
are
designed
bBsed
on
D;giI“signal
Processor
Key硼,r山:Switched
feluctance
n10tor
DSP
servo
d^ve
l引言
2
SRsD伺服系统组成
开关磁阻电动机(switched
Reluct如ce
Molor8,
简称sRM)是一种结构简单、性能价格比高和运
行可靠性高的调速电机。开关磁阻驱动系统
(sRD)调速范围大且调节操作容易实现,可通过
编程控制或在线编程控制来实现转速调节和转向
的改变。sRD启动快,转矩调节范围大.容易实现
直接传动,直接传动可省去齿轮等连接机构,它不
但降低了电机系统的成本和系统能量损失,而且
减少了系统转矩、位置误差。无位置传感器技术
的应用,使sRD结构更简单、体积更小和运行性
能更可靠,容易实现微型化。sRD用作伺服电机,
与直流、交流伺服电机相比,在性能、体积和成本
等各方面都具有一定的优势,特别是作为对于机
器人关节伺服传动系统这样的微电机系统,sRD
会有更广阔的应用前景。
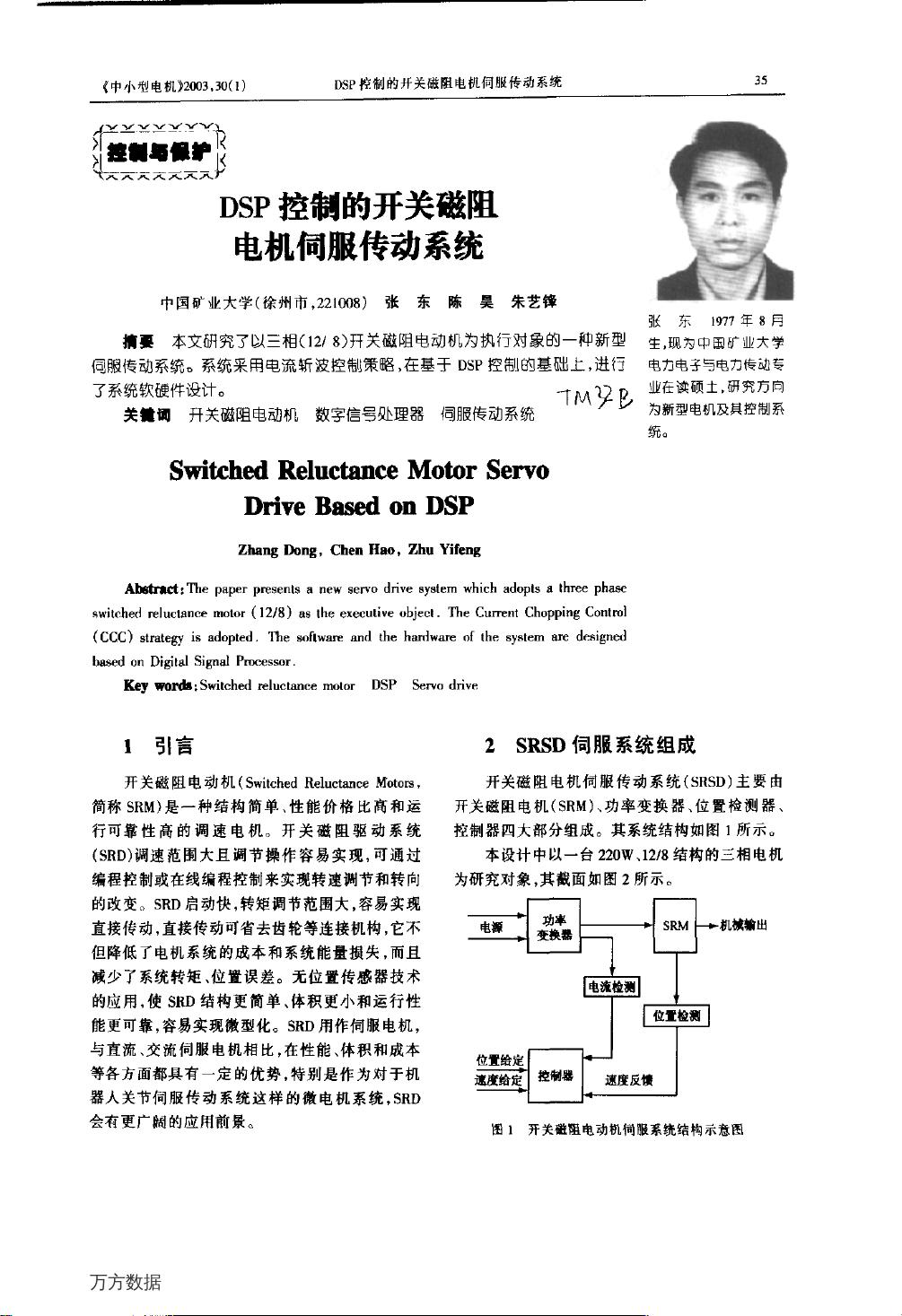
开关磁阻电机伺服传动系统(sRsD)主要由
开关磁阻电机(sRM)、功率变换器、位置检测器、
控制器四大部分组成。其系统结构如图1所示。
本设计中以一台220w、12俺结构的三相电机
为研究对象,其截面如图2所示。
机械输出
图l
开美磁阻电动机伺服系统结构示意图
万方数据
下载后可阅读完整内容,剩余4页未读,立即下载
2024-01-10 上传
2023-09-14 上传
2023-11-12 上传
2023-11-12 上传
2023-05-10 上传
2023-11-12 上传
2023-07-27 上传
2023-07-21 上传
2023-07-11 上传

hbcyg1987
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Unity UGUI性能优化实战:UGUI_BatchDemo示例
- Java实现小游戏飞翔的小鸟教程分享
- Ant Design 4.16.8:企业级React组件库的最新更新
- Windows下MongoDB的安装教程与步骤
- 婚庆公司响应式网站模板源码下载
- 高端旅行推荐:官网模板及移动响应式网页设计
- Java基础教程:类与接口的实现与应用
- 高级版照片排版软件功能介绍与操作指南
- 精品黑色插画设计师作品展示网页模板
- 蓝色互联网科技企业Bootstrap网站模板下载
- MQTTFX 1.7.1版:Windows平台最强Mqtt客户端体验
- 黑色摄影主题响应式网站模板设计案例
- 扁平化风格商业旅游网站模板设计
- 绿色留学H5模板:科研教育机构官网解决方案
- Linux环境下EMQX安装全流程指导
- 可爱卡通儿童APP官网模板_复古绿色动画设计
