SIFT算法详解:旋转与尺度不变的特征匹配
需积分: 9 158 浏览量
更新于2024-07-28
收藏 1.63MB PDF 举报
"这篇文档是关于SIFT算法的详细介绍,旨在帮助中文读者理解并掌握SIFT特征匹配技术。作者赵辉来自山东大学信息科学与工程学院,提供了对SIFT算法在宽基线条件下的应用和关键步骤的解析。"
SIFT(Scale-Invariant Feature Transform,尺度不变特征转换)算法是一种在计算机视觉领域广泛应用的特征检测和描述方法,尤其在2D和3D对象识别中表现出色。SIFT算法能够有效应对图像的各种变换,如平移、旋转、仿射变换,甚至部分遮挡和光照变化,具有高度的鲁棒性。
SIFT算法的核心步骤包括:
1. **特征点检测**:通过检测图像在不同尺度空间中的极值点,找出稳定的兴趣点。这些点通常是局部灰度变化的极大值或极小值,它们可能对应于图像中的边缘、角点或其他显著结构。尽管这些点在视觉上不一定有明显意义,但在特定尺度下,它们包含丰富的匹配信息。
2. **特征点描述**:为每个检测到的特征点生成一个描述符,这是一个能表征该点周围图像内容的向量。这个描述符应该是不变的,即在旋转、尺度缩放等变换下保持一致。这样可以确保在不同的图像条件下,特征点仍能被正确匹配。选择合适的描述符空间可以减少摄像机运动、光照变化等因素对匹配效果的影响。
3. **特征匹配**:根据特征点的描述符进行匹配,寻找相似度高的特征对,生成候选匹配点。匹配通常基于描述符之间的距离度量,例如欧氏距离或余弦相似度。
4. **匹配验证与优化**:候选匹配点可能包含误匹配,因此需要进一步的验证和优化,如使用RANSAC(Random Sample Consensus)去除错误匹配,提高匹配的准确性。
SIFT算法的鲁棒性和不变性使其在许多实际应用中成为首选,例如图像拼接、物体识别、3D重建等。然而,SIFT计算量较大,对于实时应用可能不适用。因此,后续出现了许多优化版本,如SURF(Speeded Up Robust Features)和ORB(Oriented FAST and Rotated BRIEF),以提高计算效率,同时保持一定程度的不变性。
SIFT算法在图像处理和计算机视觉领域扮演着重要角色,为图像分析和匹配提供了一种强大的工具。通过理解和应用SIFT,开发者和研究人员可以解决复杂场景下的图像匹配问题,实现更精确的图像识别和分析。
b) 独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的
匹配
[23]
。
c) 多量性,即使少数的几个物体也可以产生大量 SIFT 特征向量。
d) 高速性,经优化的 SIFT 匹配算法甚至可以达到实时的要求。
e) 可扩展性,可以很方便的与其他形式的特征向量进行联合。
Lowe 在图像二维平面空间和 DoG(Difference -of-Gaussian)尺度空间中同时检测局部极值以作为
特征点,以使特征具备良好的独特性和稳定性。DoG 算子定义为两个不同尺度的高斯核的差分,其
具有计算简单的特点,是归一化 LoG (Laplacian-of-Gaussian)算子的近似。DoG 算子如式(5-3)所示:
),,(),,(
),()),,(),,((),,(
σσ
σ
σ
σ
yxLkyxL
yxIyxGkyxGyxD
−=
∗
−
=
(5-3)
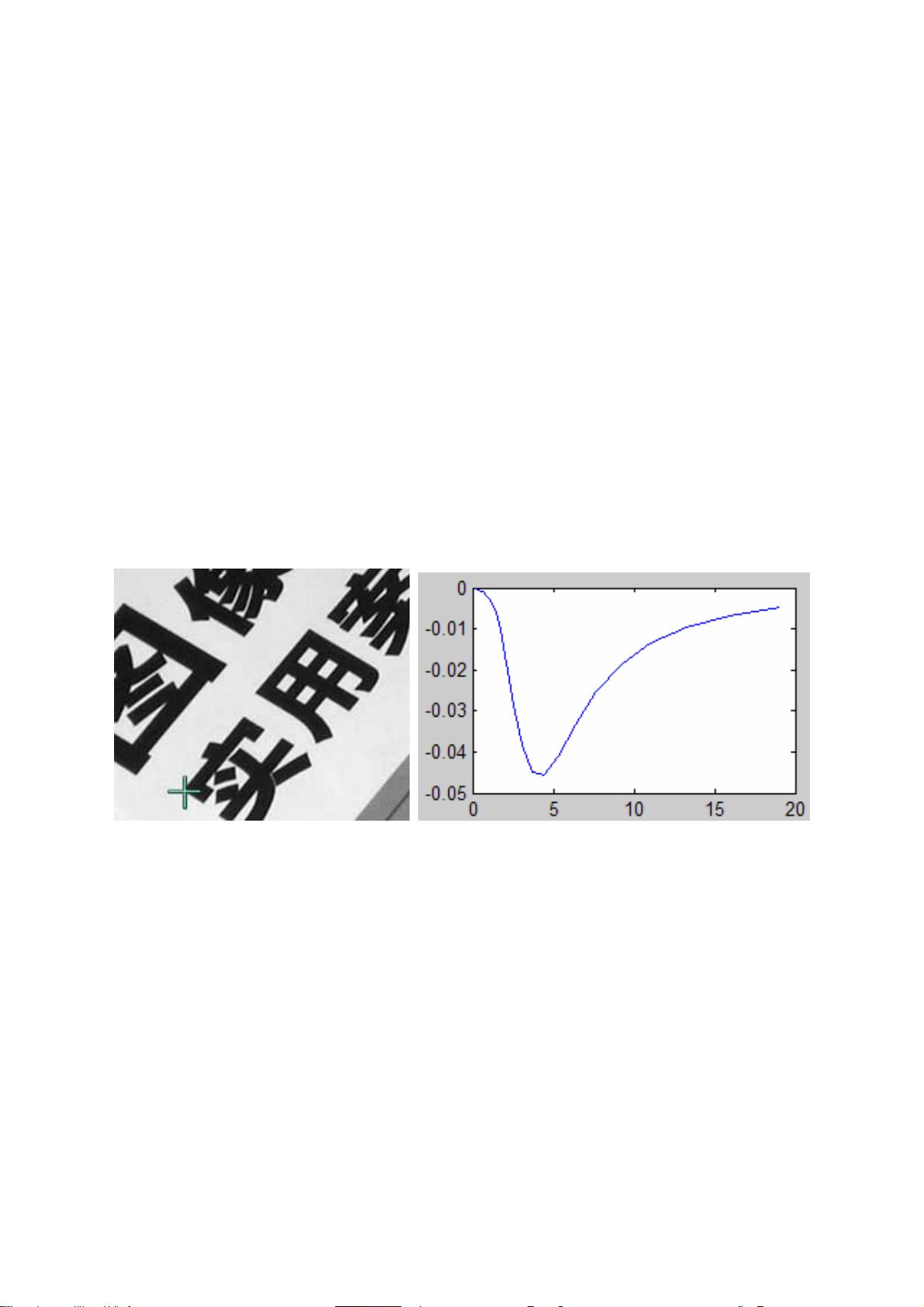
对于图像上的点,计算其在每一尺度下 DoG 算子的响应值,这些值连起来得到特征尺度轨迹曲
线。特征尺度曲线的局部极值点即为该特征的尺度。尺度轨迹曲线上完全可能存在多个局部极值点,
这时可认为该点有多个特征尺度。
(a) 测试图像 (b) 尺度轨迹曲线
图 5-1 尺度轨迹
图 5-1(b)为图 5-1(a)中十字花点处的尺度轨迹曲线。可见该图中尺度轨迹曲线在大约
σ
=5 处取得
局部极小值。
SIFT
特征匹配算法包括两个阶段,第一阶段是 SIFT 特征的生成,即从多幅待匹配图像中提取出
对尺度缩放、旋转、亮度变化无关的特征向量;第二阶段是 SIFT 特征向量的匹配。
下面本文来具体介绍一下 SIFT 算法。一幅图像 SIFT 特征向量的生成算法总共包括 4 步:
(1)尺度空间极值检测,以初步确定关键点位置和所在尺度。
剩余14页未读,继续阅读
2022-06-08 上传
2009-11-16 上传
493 浏览量
2023-12-27 上传
2023-04-05 上传
2024-01-12 上传
2023-04-30 上传
2024-01-18 上传
2023-06-01 上传









