MPC837xE-RDB参考设计原理图Rev2.1详细解析
需积分: 9 75 浏览量
更新于2024-08-01
收藏 569KB PDF 举报
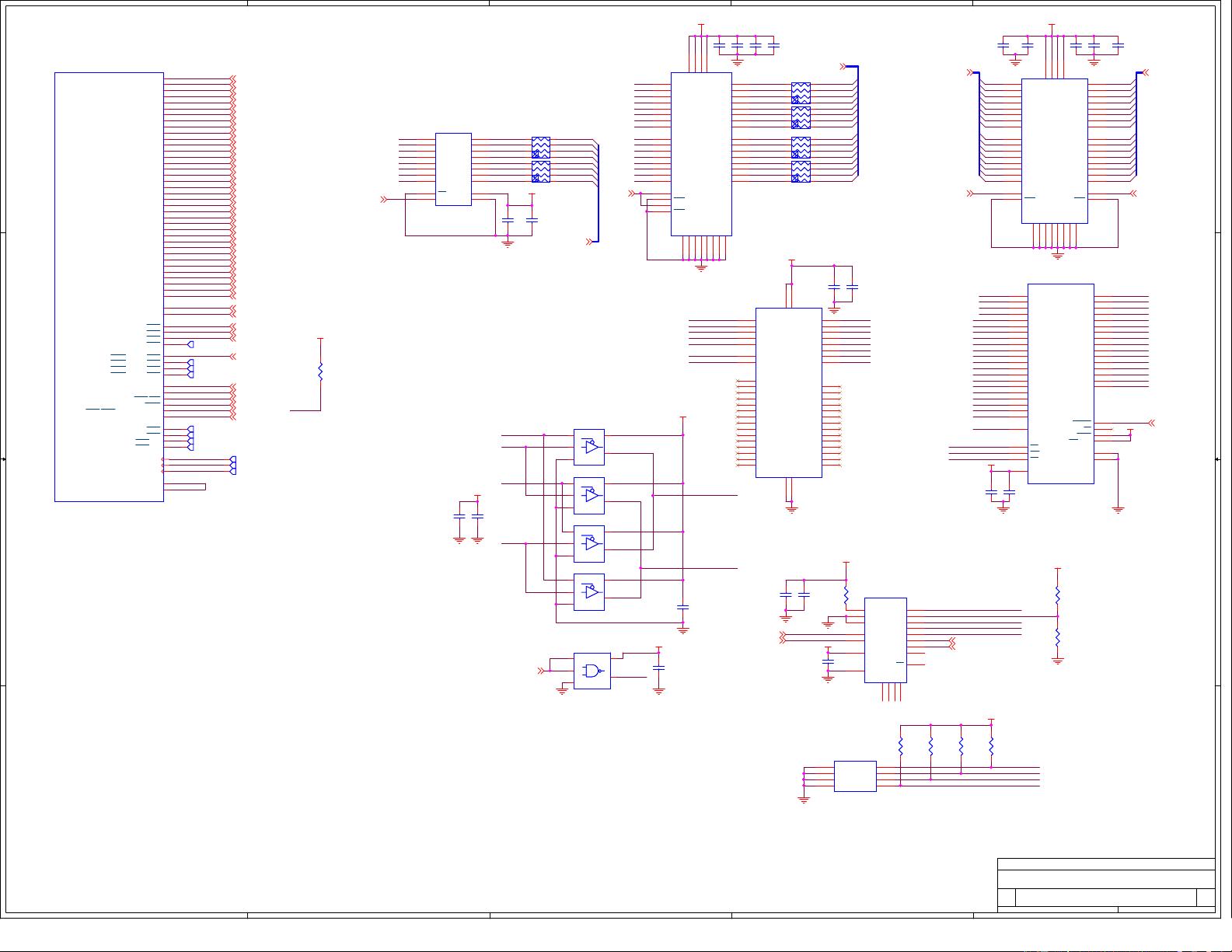
"MPC837xE-RDB_Schematic_Rev2.1 是一份关于PowerPC MPC837系列CPU的硬件参考设计的详细原理图,涵盖了从电源管理到接口通信等多个方面的内容。该文档共包含15页,分别详细阐述了各个关键组件和模块的布局与连接。"
在MPC837xE-RDB的设计中,重点涉及以下知识点:
1. **PowerPC MPC837 CPU**:MPC837是PowerPC架构的一个型号,由Freescale Semiconductor(现NXP)生产,适用于嵌入式系统,具有高性能和低功耗的特点。它集成了多种处理器核心,如e200z3,支持多任务处理和高效能运算。
2. **硬件设计**:该参考设计包括了完整的硬件实施方案,例如DDR2内存、本地总线、NOR/NAND闪存、PCI接口、eTSEC(以太网媒体访问控制器)、SATA、PCI-E、miniPCI-E、SD卡接口、USB PHY/HUB、UART、电源去耦合电路、以太网PHY、L2交换机、MCU、I2C、LCD显示和电源供应等。
3. **内存系统**:DDR2内存芯片用于高速数据存储,提供了高带宽的数据传输。本地总线连接CPU与其他主要组件,确保快速数据交换。
4. **存储接口**:NOR/NAND闪存提供非易失性存储,用于系统启动和其他重要数据的存储。PCI接口则用于扩展板卡,提供额外功能。
5. **网络接口**:eTSEC模块负责千兆以太网连接,通过RTL8211B和VSC7385芯片实现。这些接口提供了高速网络通信能力。
6. **串行接口**:UART(通用异步收发传输器)用于标准串行通信,如调试和设备控制。
7. **电源管理**:设计中详细列出了不同电压等级的电源,如12V(V1200)、5V(V500)、3.3V(V330)、2.5V(V250)、1.8V(V180)、1.5V(V150)和1.2V(V120),以及核心电压VCORE,这些都是确保系统正常运行的关键。
8. **中断系统**:中断(IRQ)系统是硬件与操作系统通信的重要方式,如IRQ0至IRQ5,分别对应MCU(如有RTC和热管理)、eTSEC1PHY、eTSEC2GbE、USB、SD写保护和PCI INTA等事件。
9. **其他接口**:SATA用于高速硬盘连接,PCI-E和miniPCI-E接口支持高速扩展设备。USB PHY/HUB模块处理USB设备的接入和管理。LCD接口用于连接显示器,提供图形界面。
10. **MCU、I2C及其他**:MCU(微控制器)可能包含了RTC(实时时钟)和温度传感器功能,I2C总线用于连接各种低速外设,如传感器和配置芯片。
这个原理图详尽地展示了MPC837xE-RDB平台的硬件结构,为开发者和工程师提供了构建基于PowerPC MPC837处理器系统的详细指南。通过理解和分析这份资料,可以有效地进行系统设计、故障排查和性能优化。
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
LBD0
LAD3
LAD4
LBD1
LAD0
LBD2
LAD15
LAD10
LAD14
LAD8
LAD12
LAD11
LAD13
LAD9
LAD7
LAD6
LAD1
LBD3
LAD2
LBD9
LBD8
LBD11
LBD10
LBD14
LBD15
LBD13
LBD12
LAD5
LBD4
LBD5
LBD6
LBD7
LBD8
LBD9
LBD10
LBD11
LBD12
LBD13
LBD14
LBD15
LBD3
LBD2
LBD1
LBD0
LBD7
LBD6
LBD5
LBD4
PORESET#
NOR_CS#
LWE0#
LGPL2
LBD0
LBD1
LBD2
LBD3
LBD4
LBD5
LBD6
LBD7NAND_CS#
LWE0#
LGPL2
LGPL3
LGPL4
LGPL0
LGPL1
BOOT1#
BOOT0#
LCS0#
LCS1#
BOOT0#
NOR_CS#
NAND_CS#
RSVD1
RSVD0
BOOT1#
REV1
RSVD1
REV1
REV0
RSVD0
BOOT0#
IIC1_SDA
IIC1_SCL
LA28
LA29
LA30
LA27
LGPL2
LGPL3
LGPL4
LGPL5
LGPL0
LGPL1
LAD0
LAD1
LAD2
LAD3
LAD4
LAD5
LAD6
LAD7
LAD8
LAD9
LAD10
LAD11
LAD12
LAD13
LAD14
LAD15
LALE
LCLK0
LCLK1
LWE0#
LCS0#
LCS1#
LBCTL
LGPL4
LCLK2
LA27
LA28
LA29
LA30
LA31
LAD16
LAD17
LAD18
LAD19
LAD20
LAD21
LAD22
LAD23
LAD24
LAD25
LAD26
LAD27
LAD28
LAD29
LAD30
LAD31
LBA26
LBA25
LBA24
LBA9
LBA10
LBA11
LBA12
LBA13
LBA14
LBA15
LBA16
LBA17
LBA18
LBA19
LBA20
LBA21
LBA22
LBA23
LAD27
LAD24
LAD25
LAD26
LAD16
LAD21
LAD17
LAD23
LAD19
LAD20
LAD18
LAD22
LBA26
LBA25
LBA24
LBA21
LBA17
LBA20
LBA23
LBA16
LBA22LBA22
LBA19
LBA18
RLBA23
RLBA18
RLBA20
RLBA17
RLBA22
RLBA21
RLBA16
RLBA19
RLBA26
RLBA24
RLBA25
LAD8
LAD14
LAD15
LAD10
LAD9
LAD13
LAD11
LAD12
LBA8
LBA11
LBA15
LBA14
LBA10
LBA13
LBA12
LBA9
RLBA10
RLBA12
RLBA13
RLBA8
RLBA14
RLBA15
RLBA9
RLBA11 RLBA27
RLBA28
RLBA29
RLBA30
RLBA31
LBA27
LBA28
LBA29
LBA30
LBA31
LAD28
LAD29
LAD30
LAD31
LCS2#
V330
V330
V330
V330
V330
V330
V330
V330
V330
V330
V330
V330
V330
V330
LALE
LAD[15..0]
LBCTL LBCTL
LBD[15..0] 11
BOOT1#
IIC1_SDA7,13
IIC1_SCL7,13
MPCI_CLKRUN# 4
LGPL2 11
LGPL3
LGPL5
LGPL4 11
LGPL1
LGPL0
LAD0
LAD1
LAD3
LAD2
LAD5
LAD4
LAD7
LAD6
LAD8
LAD12
LAD11
LAD10
LAD9
LAD15
LAD14
LAD13
LALE
LWE0# 11
LCS0#
LCS1#
LBCTL
LA27
LA28
LA29
LA30
LA31
LAD16
LAD17
LAD18
LAD19
LAD20
LAD21
LAD22
LAD23
LAD24
LAD25
LAD26
LAD27
LAD28
LAD29
LAD30
LAD31
LBA[8..31]11
LALE
LBA[8..31]11
PORESET# 8,13
LCD_EN# 14
LCS2# 11
Title
Size Document Number Rev
Date: Sheet
of
MPC837xE-RDB 2.1
837x Local Bus and Misc.
C
315Thursday, August 20, 2009
Title
Size Document Number Rev
Date: Sheet of
MPC837xE-RDB 2.1
837x Local Bus and Misc.
C
315Thursday, August 20, 2009
Title
Size Document Number Rev
Date: Sheet of
MPC837xE-RDB 2.1
837x Local Bus and Misc.
C
315Thursday, August 20, 2009
ON
ON
ON
ON
REV1
DEFAULT
BOOT1#
RSVD0
RSVD1
32M x 8
REV[0..1]: read by core, Board Revision (Rev 1.0=00, REV 1.1=01)
RSVD[0..1]: Reserved
BOOT0: read by core to know which flash is being booted
PCF8574A: Address: 0111001 (0x39)
IDD MAX 25mA @ 3.3V = 0.08W
IDD MAX 30mA @ 3.3V = 0.1W
IDD typ 100mA @ 3.3V = 0.3W
IDD typ 100mA @ 3.3V = 0.3W
IDD typ 100mA @ 3.3V = 0.3W
Not used
1B1
2
1B2
3
1B3
5
1B4
6
1B5
8
1B6
9
1B7
11
1B8
12
1A1
47
1A2
46
1A3
44
1A4
43
1A5
41
1A6
40
1A7
38
1A8
37
2B1
13
2B2
14
2B3
16
2B4
17
2B5
19
2B6
20
2B7
22
2B8
23
2A1
36
2A2
35
2A3
33
2A4
32
2A5
30
2A6
29
2A7
27
2A8
26
1DIR
1
1OE
48
2DIR
24
2OE
25
VDD1
7
VDD2
18
VDD3
31
VDD4
42
GND1
4
GND2
10
GND3
15
GND4
21
GND5
28
GND6
34
GND7
39
GND8
45
U7
74LCX16245
U7
74LCX16245
C38
0.01uF
C38
0.01uF
C50
0.01uF
C50
0.01uF
RN20 33RN20 33
TP17TP17
C92
0.01uF
C92
0.01uF
I
2
O
4
OE
1
VCC
5
GND
3
U13
M74VHC1G125DFT1G
U13
M74VHC1G125DFT1G
C45
0.01uF
C45
0.01uF
C40
0.01uF
C40
0.01uF
RN3 33RN3 33
R26
4.7K
R26
4.7K
C39
0.01uF
C39
0.01uF
TP15TP15
R413
4.7K
R413
4.7K
C41
10UF
C41
10UF
R/B#
7
RE#
8
CE#
9
VCC
12
VSS
13
CLE
16
ALE
17
WE#
18
WP#
19
IO0
29
IO1
30
IO2
31
IO3
32
VSS
36
VCC
37
IO4
41
IO5
42
IO6
43
IO7
44
NC1
1
NC2
2
NC3
3
NC4
4
NC5
5
NC6
6
NC10
10
NC11
11
NC14
14
NC15
15
NC20
20
NC21
21
NC22
22
NC23
23
NC24
24
NC25
25
NC26
26
NC27
27
NC28
28
NC33
33
NC34
34
NC35
35
NC38
38
NC39
39
NC40
40
NC45
45
NC46
46
NC47
47
NC48
48
U8
K9F5608U0D-PCB0
U8
K9F5608U0D-PCB0
R246
4.7K
R246
4.7K
D0
3
D1
4
D2
7
D3
8
D4
13
D5
14
D6
17
D7
18
OE
1
LE
11
O0
2
O1
5
O2
6
O3
9
O4
12
O5
15
O6
16
O7
19
VDD
20
GND
10
U24
MC74LCX373DTR2G
U24
MC74LCX373DTR2G
RN4 33RN4 33
I
2
O
4
OE
1
VCC
5
GND
3
U14
M74VHC1G125DFT1G
U14
M74VHC1G125DFT1G
C33
0.01uF
C33
0.01uF
TP5TP5
RN22 33RN22 33
TP6TP6
RN1 33RN1 33
TP20TP20
I
2
O
4
OE
1
VCC
5
GND
3
U17
M74VHC1G125DFT1G
U17
M74VHC1G125DFT1G
A0
6
A1
7
A2
9
P0
10
P1
11
P2
12
P3
14
P4
16
P5
17
P6
19
P7
20
INT
1
SDL
2
SDA
4
VCC
5
GND
15
NC1
3
NC2
8
NC3
13
NC4
18
U10
PCF8574
U10
PCF8574
SW1a
1
SW2a
2
SW3a
3
SW2b
7
SW3b
6
SW4b
5
SW1b
8
SW4a
4
S4
SW SPST
S4
SW SPST
C34
0.01uF
C34
0.01uF
LAD0
E24
LAD1
G28
LAD2
H25
LAD3
F26
LAD4
C26
LAD5
J28
LAD6
F21
LAD7
F23
LAD8
E25
LAD9
E26
LAD10
A23
LAD11
F24
LAD12
G24
LAD13
F25
LAD14
H28
LAD15
G25
LAD16/LA11
F27
LAD17/LA12
B21
LAD18/LA13
A25
LAD19/LA14
C28
LAD20/LA15
H24
LAD21/LA16
E23
LAD22/LA17
B28
LAD23/LA18
D28
LAD24/LA19
A27
LAD25/LA20
C25
LALE/LA10
H29
LCS0
D25
LCS1
F19
LCS2
C27
LCS3
D24
LWE0/LFWE0/LBS0
E22
LWE1/LFWE1/LBS1
B25
LBCTL
A22
LGPL0/LFCLE
D21
LGPL1/LFALE
A26
LGPL2/LFRE/LOE
F22
LGPL3/LFWP
C21
LGPL4/LFRB/LGTA/LUPWAIT/LPBSE
J29
LGPL5/LA9
G29
LCLK0
B22
LCLK1
C23
LAD26/LA21
B27
LAD27/LA22
H27
LAD28/LA23
E21
LAD29/LA24
F20
LAD30/LA25
D29
LAD31/LA26
E20
LA27
H26
LA28
C29
LA29
E28
LA30
B26
LA31
J25
LWE2/LFWE2/LBS2
E27
LWE3/LFWE3/LBS3
F28
LCLK2
B23
LDP0/LCS4
C24
LDP1/LCS5
B29
LDP2/LCS6/LA7
E29
LDP3/LCS7/LA8
F29
LSYNC_IN
A21
LSYNC_OUT
D23
eLBC
U1D
MPC8379EVRANG
eLBC
U1D
MPC8379EVRANG
C226
0.01uF
C226
0.01uF
TP49TP49
C179
10UF
C179
10UF
TP18TP18
I0
1
I1
2
O
4
VCC
5
GND
3
U18
MC74VHC1G00
U18
MC74VHC1G00
C227
0.01uF
C227
0.01uF
R247
4.7K
R247
4.7K
TP16TP16
A0
25
A1
24
A2
23
A3
22
A4
21
A5
20
A6
19
A7
18
A8
8
A9
7
A10
6
A11
5
A12
4
A13
3
A14
2
A15
1
A16
48
A17
17
A18
16
A19
9
DQ0
29
DQ1
31
DQ2
33
DQ3
35
DQ4
38
DQ5
40
DQ6
42
DQ7
44
DQ8
30
DQ9
32
DQ10
34
DQ11
36
DQ12
39
DQ13
41
DQ14
43
DQ15/A-1
45
RY/BY
15
BYTE
47
A20
10
NC
13
WP/ACC
14
CE
26
RESET
12
VSS1
27
VSS2
46
WE
11
OE
28
VCC
37
U9
S29GL064N90TFIR30
U9
S29GL064N90TFIR30
C180
10UF
C180
10UF
R30
4.7K
R30
4.7K
TP23TP23
I
2
O
4
OE
1
VCC
5
GND
3
U16
M74VHC1G125DFT1G
U16
M74VHC1G125DFT1G
C35
0.01uF
C35
0.01uF
C36
0.01uF
C36
0.01uF
C44
0.01uF
C44
0.01uF
Q0
2
Q1
3
Q2
5
Q3
6
Q4
8
Q5
9
Q6
11
Q7
12
D0
47
D1
46
D2
44
D3
43
D4
41
D5
40
D6
38
D7
37
D8
36
D9
35
D10
33
D11
32
D12
30
D13
29
D14
27
D15
26
LE1
48
OE1
1
LE2
25
OE2
24
Q8
13
Q9
14
Q10
16
Q11
17
Q12
19
Q13
20
Q14
22
Q15
23
GND1
4
GND8
10
GND7
15
GND6
21
GND5
28
GND4
45
GND3
39
GND2
34
VDD4
7
VDD1
18
VDD2
31
VDD3
42
U6
74LCX16373MTD
U6
74LCX16373MTD
TP7TP7
C52
0.01uF
C52
0.01uF
R18
4.7K
DNP
R18
4.7K
DNP
C343
0.01uF
C343
0.01uF
R244
4.7K
R244
4.7K
RN2 33RN2 33
R245
4.7K
R245
4.7K
C344
0.01uF
C344
0.01uF
C43
0.01uF
C43
0.01uF
C296
0.01uF
C296
0.01uF
C37
0.01uF
C37
0.01uF
TP19TP19
剩余14页未读,继续阅读
209 浏览量
334 浏览量
334 浏览量
2024-11-11 上传
2024-11-11 上传
2024-11-11 上传
2021-05-22 上传

天涯静默
- 粉丝: 15
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- jdk-7u80-windows-x64.exe
- CRM成功的十大秘诀DOC
- InsectDefense
- ProClub:2015-2016年霍姆斯特德高中编程俱乐部工作坊资料
- cryptmount:Linux加密文件系统管理工具-开源
- Zadania-Informatyka
- cards_test_task
- 三菱PLC通过三菱控件与PC交互
- 留住客户还不够
- tv-remote-control:在浏览器上运行的电视遥控模拟器
- python-utils:在Keboola Connection环境中运行的Python应用程序的实用程序库
- 数据库世界:CS340网站数据库
- cpu环境下可运行的骨骼序列行为识别的代码
- IFCX-开源
- st-tutorial.github.io
- DeliveryTracker:大韩民国的快递服务跟踪器写在Rust中
