深度学习与相关滤波在目标跟踪中的应用与挑战
版权申诉
186 浏览量
更新于2024-06-29
收藏 857KB DOCX 举报
"本文深入探讨了基于位置修正机制和模型更新策略的跟踪算法在解决目标跟踪问题中的应用。文章首先介绍了目标跟踪在计算机视觉中的重要性,特别是在自动驾驶、人机交互、无人机侦察和视频监控等领域的关键作用。接着,它指出了目标跟踪面临的诸多挑战,如光照变化、遮挡、尺度变化、形变、快速运动、运动模糊以及背景相似物干扰,这些因素都增加了准确跟踪的难度。
针对遮挡问题,文献中提到了一些先进的跟踪算法,包括基于相关滤波(Correlation Filter, CF)和深度学习的方法。前者追求实时性,后者注重准确性,但深度学习方法需要大量的训练数据和计算时间。文章引用了几个相关研究,例如核循环结构跟踪器(CSK)由Henriques等人提出,利用循环矩阵和核函数提升算法速度;Danelljan等人扩展了CSK,引入多通道颜色特征来改善目标表示,减轻遮挡问题的影响;Ma等人提出的一种长期相关滤波跟踪算法,能在跟踪失败时通过重检测恢复正确状态;C-COT(Learning Continuous Convolution Operators for Visual Tracking)则采用深度特征来应对部分遮挡;DSST(Discriminative Scale Space Tracking)通过独立的相关滤波器实现尺度自适应;ECO(Efficient Convolution Operators for Tracking)是C-COT的优化版本,它保持高精度和鲁棒性,同时提高了运算速度。
此外,Wang等人提出了一种高置信度检测方法,通过自适应地更新滤波器模型,有效地解决了跟踪过程中的遮挡和相似物干扰问题。这些方法都在一定程度上解决了目标跟踪中的核心难题,尤其是在处理遮挡和形变方面,提升了跟踪算法的性能和鲁棒性。
总结来说,本文分析了一系列基于位置修正和模型更新策略的跟踪算法,这些算法在处理遮挡、尺度变化等复杂场景时展现出了显著的优势。尽管深度学习方法提供了更高的准确性,但实时性仍然是一个挑战。未来的研究可能会继续寻找平衡实时性和准确性的新方法,以便在更广泛的实时应用中实现更高效、更准确的目标跟踪。"
2 基于位置修正机制和模型更新策略的目标跟踪算法
本文中的目标跟踪算法是基于 DSST
[9]
相关滤波算法做的改进,算法包含 3 个部分:
1) 针对跟踪过程中发生的遮挡,提出一种融合 HOG
[15]
和 CN 特征的位置修正机制;
2) 在位置修正机制中,对融合后的特征做 PCA 降维处理,以提高算法效率;
3) 利用平均峰值相关能量、多峰检测及最大响应值自适应地更新滤波器模型.
2.1 特征融合的位置修正机制
HOG 局部鲁棒性较好,但是对图像的全局变化不敏感,而 CN 特征可以反映目标外观的 10 维主题
颜色信息,对目标的全局鲁棒性较好.虽然提取深度特征会使跟踪结果更加准确且鲁棒性更强,但是时间
损耗太大且无法满足跟踪的实时性,本文融合 HOG 特征和 CN 特征优化算法性能,提高了算法整体的鲁
棒性.
大多数跟踪算法都是先确定目标位置,再在当前目标位置处精准评估目标尺度,这就要求目标位置
必须准确.然而,在现实的跟踪过程中,会遇到很多干扰因素,如遮挡物、相似背景、快速运动及目标形
变量大等,当出现这些干扰因素时,目标位置判断不准确,就会发生跟踪丢失或跟踪漂移的现象.对此,
本文提出一种融合 HOG 特征和 CN 特征的位置修正机制,缓解了跟踪漂移和跟踪丢失的现象.
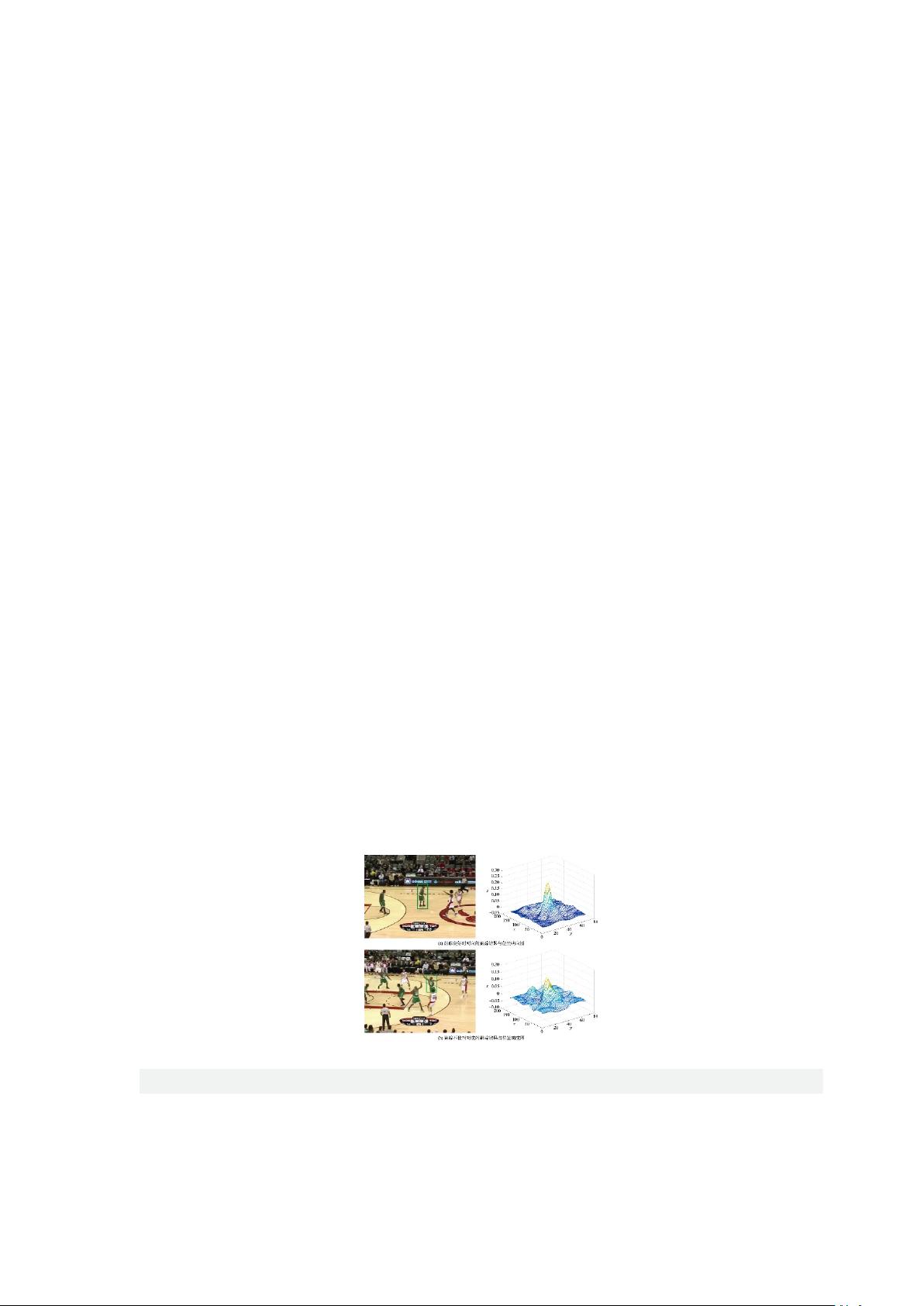
图 1 和图 2 中的绿色矩形框是根据式(4)和式(5)精准评估目标当前位置和尺度绘制而成,位置响应
图的 x 轴和 y 轴对应检测图像块的宽(w)和高(h),坐标点表示图像对应的像素点,纵坐标表示相关滤波器
输出的相应分数值 y,由式(4)可知相关滤波器输出响应分数的最大值所在位置即目标位置.当跟踪准确的
时候,对应一个峰值明显且近似高斯函数的响应图,如图 1(a)和图 2(a),而当目标跟踪效果不佳的时
候,如遮挡、丢失、形变量大以及模糊等,响应图表现出剧烈的振荡,如图 1(b)和图 2(b)所示(图像序列
是 VOT2017 中的序列 Basketball 和 Girl2).
图 1 Basketball 序列的跟踪结果与位置响应图 Fig.1 Position response map of Basketball sequence
图选项
剩余14页未读,继续阅读
2019-09-07 上传
2022-05-29 上传
2024-07-25 上传
2022-05-31 上传
2022-07-05 上传
2023-07-23 上传
2022-06-02 上传
2022-06-02 上传
2022-11-03 上传

罗伯特之技术屋
- 粉丝: 4451
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
