MDIN200 VGA开发手册:视频处理与驱动指南
需积分: 19 70 浏览量
更新于2024-08-02
收藏 1.04MB PDF 举报
"MDIN200_datasheet_v0.4.pdf——这是一款VGA的开发手册,可作为视频处理驱动开发的指导手册,标签包括mdin和vga。"
MDIN-200是一款由Macro Image Technology, Inc.推出的第四代SD到全高清上转换器。这款芯片专为视频处理和驱动开发设计,特别是在VGA显示技术领域具有重要的应用价值。该数据手册是开发人员进行相关工作的重要参考资料。
MDIN-200的特点和功能包括:
1. 高度集成:MDIN-200是一款单芯片解决方案,集成了去交织和格式转换功能。这意味着它可以处理不同类型的视频信号,无论是逐行扫描还是隔行扫描,都能轻松应对。
2. 10位精度的数字视频输入:支持10位颜色组件精度的数字视频输入,确保了高画质的视频处理。这在处理高清内容时尤其重要,因为它能提供更丰富的色彩层次和细节。
3. 多样化的输入和输出接口:MDIN-200提供可配置的数字视频输入端口,适应不同类型的视频源。同时,它还具备模拟组件输出端口和数字输出端口,专用于输出逐行扫描类型的视频信号,适用于各种显示设备。
4. 法律声明:文档受到版权保护,未经Macro Image Technology, Inc.的书面同意,禁止复制、分发或公开展示此文档。此外,文档内容可能在未通知的情况下发生变化,使用者应保持对最新版本的关注。
5. 保密性:MDIN-200的数据手册被标记为Macro Image Technology, Inc.的机密资料,表明其技术细节和规格可能包含公司的核心技术信息。
这款开发手册将帮助工程师理解和利用MDIN-200的特性,进行VGA视频处理和驱动程序的开发。对于需要处理高清视频信号,或者需要进行格式转换的项目来说,MDIN-200提供了强大的硬件支持。通过详细阅读和理解手册中的技术参数和操作指南,开发人员可以优化系统性能,实现高效的视频处理流程。
MDIN-200
Datasheet Version 0.4
Macro Image Technology, Inc. Confidential
7
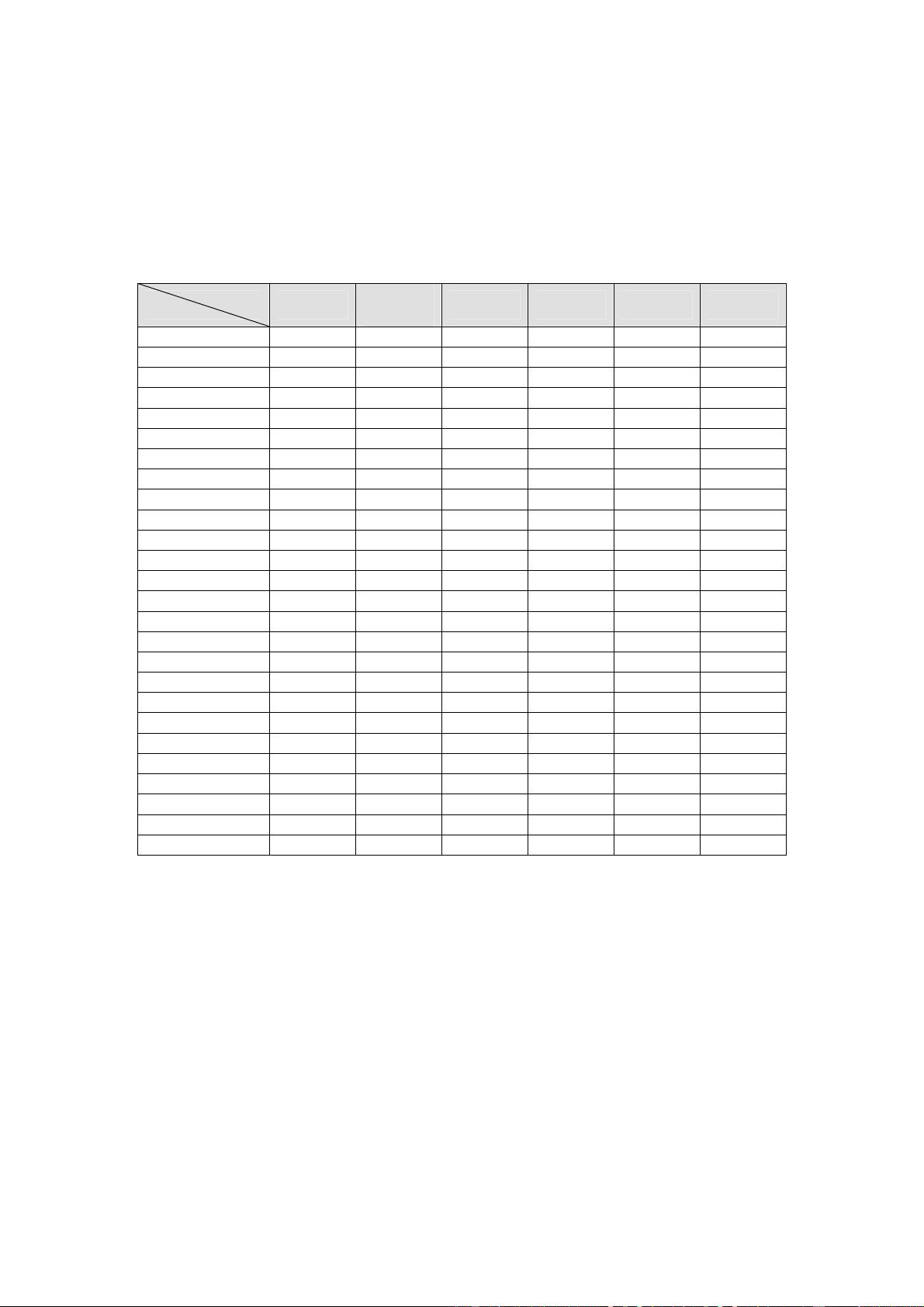
2.2 Output Port Pin Mapping
MDIN-200 has configurable digital output pins as shown in Table 2-2. The output port pin maping is
determined by digital_out_format and digital_8bit_out_en of the register out_control (address 0x4A2).
Mode
Pin Name
RGB 4:4:4
8-bit
YCbCr
4:4:4
8-bit
YC 4:2:2
10-bit
YC 4:2:2
8-bit
YC-muxed
10-bit
YC-muxed
8-bit
DATA_OUT0 B0 Cb0 - - - -
DATA_OUT1 B1 Cb1 - - - -
DATA_OUT2 B2 Cb2 Y0 - YC0 -
DATA_OUT3 B3 Cb3 Y1 - YC1 -
DATA_OUT4 B4 Cb4 - - - -
DATA_OUT5 B5 Cb5 - - - -
DATA_OUT6 B6 Cb6 C0 - - -
DATA_OUT7 B7 Cb7 C1 - - -
DATA_OUT8 G0 Y0 Y2 Y0 YC2 YC0
DATA_OUT9 G1 Y1 Y3 Y1 YC3 YC1
DATA_OUT10 G2 Y2 Y4 Y2 YC4 YC2
DATA_OUT11 G3 Y3 Y5 Y3 YC5 YC3
DATA_OUT12 G4 Y4 Y6 Y4 YC6 YC4
DATA_OUT13 G5 Y5 Y7 Y5 YC7 YC5
DATA_OUT14 G6 Y6 Y8 Y6 YC8 YC6
DATA_OUT15 G7 Y7 Y9 Y7 YC9 YC7
DATA_OUT16 R0 Cr0 C2 C0 - -
DATA_OUT17 R1 Cr1 C3 C1 - -
DATA_OUT18 R2 Cr2 C4 C2 - -
DATA_OUT19 R3 Cr3 C5 C3 - -
DATA_OUT20 R4 Cr4 C6 C4 - -
DATA_OUT21 R5 Cr5 C7 C5 - -
DATA_OUT22 R6 Cr6 C8 C6 - -
DATA_OUT23 R7 Cr7 C9 C7 - -
digital_out_format
‘00’ ‘00’ ‘01’ ‘01’ ‘10’ ‘10’
digital_8bit_out_en
don’t care don’t care ‘0’ ‘1’ ‘0’ ‘1’
Table 2-2. Output Port Pin Mapping
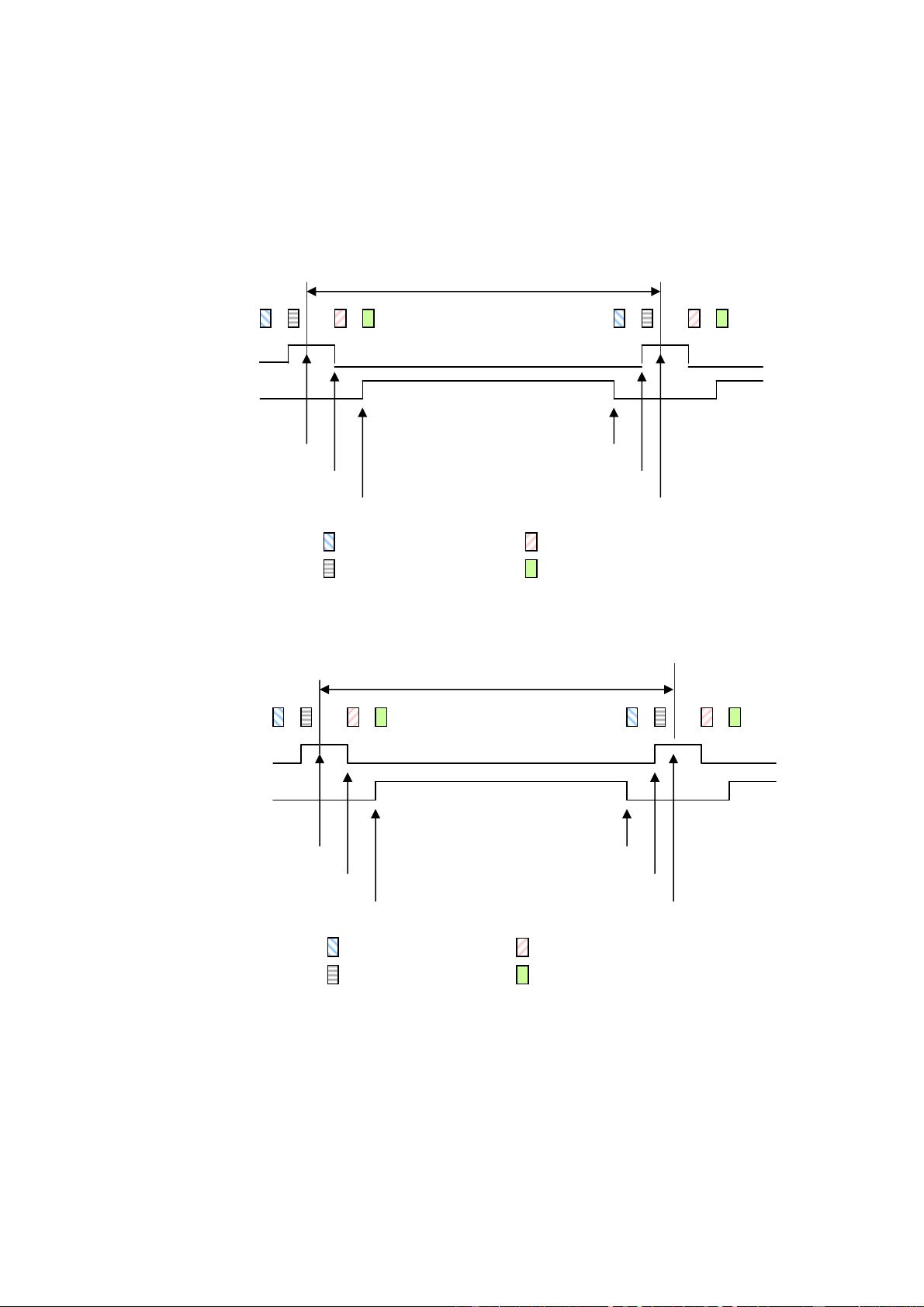
2.3 Active Window Size and Position of Input Video
MDIN-200 can be programmed to define the size and position of the received video by register setttings. It is necessary
to adjust active window size and position of input video when horizontal and vertical timing signals received through input
port A are sync signal, not active signal. In this case, the function of adjusting size and position that MDIN-200 provides is
very helpful to extract the desired active video data without glue logic within a system. Figure 2-1 shows how this function
works. The horizontal size is determined by in_size_h register, and the result is the minimum value between the register
value and duration of the received horizontal sync signal. The vertical size is determined by in_size_v register, and the
result is the minimum value between the register value and duration of the received vertical sync signal. The offset of
horizontal position is determined by in_hact_offset register. As a result, active window is shifted by the register value.
The offset of vertical position is also controlled as that of horizontal position by in_vact_offset register.


剩余107页未读,继续阅读
191 浏览量
227 浏览量
469 浏览量
2022-07-15 上传
2024-03-28 上传
899 浏览量
2022-11-11 上传
2021-11-24 上传
901 浏览量

dangl
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于STM32硬件IIC DMA传输的SSD1306 OLED屏的高级应用程序
- 唯美创意PPT.zip
- witness:用于识别《见证人》中拼图模式的深度学习模型
- Free Password Manager & Authenticator & SSO-crx插件
- apkeasytool反编译工具
- automaticSkilledReaching_arduino:为Leventhal实验室中使用的鼠标单颗粒熟练触及盒开发的Arduino代码
- NSIS安装工具.rar
- torch_sparse-0.6.5-cp37-cp37m-linux_x86_64whl.zip
- 二级图文平滑下拉菜单
- IPVT Screen Capturing-crx插件
- hypothesis-gufunc:扩展假设以测试numpy通用函数
- 电信设备-基于移动终端的用户衣橱服饰管理方法.zip
- video downloadhelper 7.4及VdhCoAppSetup-1.5.0.exe
- 组合:来自训练营的项目组合
- 顶部固定、二级栏目之间相互滑动的导航菜单
- LJSuperScanParse
