U-Boot重定位下的ARM C语言寻址解析
需积分: 9 171 浏览量
更新于2024-09-12
收藏 716KB DOCX 举报
"ARM架构C语言寻址解析——从U-Boot重定位展开的探索"
本文主要探讨了在ARM架构上,C语言是如何处理变量和函数的寻址问题,特别是针对U-Boot这样的嵌入式系统,它需要在不同的内存空间运行,即运行基地址与连接基地址可能不一致的情况。在传统的二进制程序中,连接基地址通常等于运行基地址,但U-Boot通过重定位(relocation)技术实现了在不同内存位置的运行。
首先,文章的第一部分深入解析了在GNU ARM工具链下,无位置无关代码(Position Independent Code, PIC)编译选项时的C语言寻址方式。在非PIC模式下,编译器假设代码和数据都有固定的内存位置,因此生成的指令直接引用绝对地址。当程序被加载到不同的地址时,这些直接引用可能导致错误,除非进行了重定位处理。重定位的过程包括修改代码中的地址信息,使其适应新的运行环境。
第二部分则涉及了使用位置无关代码编译选项时的情况。在位置无关代码模式下,编译器生成的代码不包含绝对地址,而是使用相对地址或全局偏移量。这样,即使代码被加载到不同地址,也可以通过全局偏移表(Global Offset Table, GOT)和动态链接器来正确寻址。这种方式在共享库和某些嵌入式系统中常见,因为它允许代码在多个位置运行。
第三部分,作者详细解释了U-Boot的重定位过程。U-Boot的源代码包含了一套重定位机制,使得程序可以在连接地址和运行地址不匹配的情况下正确执行。这一机制涉及到了对指令和数据的修改,确保所有依赖于绝对地址的部分都能适应新的内存布局。U-Boot的这种能力对于嵌入式系统非常重要,因为它可以在启动时加载到不同的内存区域,如从Flash复制到RAM执行。
为了更好地理解这些概念,作者给出了具体的工具、目标平台和源代码示例,如Ubuntu 10.04作为宿主机,BeagleBoard作为目标平台,使用arm-2011.09-69-arm-none-eabi交叉编译工具链,以及arm_pic例程和U-Boot 2011.12源码。熟悉ARM架构的C语言和汇编语言,以及ARM开发工具的读者将更容易理解文章内容。
总结来说,这篇系列文章详细剖析了在ARM架构上,C语言在不同寻址模式下的工作原理,以及U-Boot如何通过重定位技术实现灵活的内存部署。对于想要深入理解嵌入式系统和ARM编程的读者来说,这是一份非常有价值的参考资料。
变量名 数据段 地址 初始值
,/:9999-999999995)099995
,/9999999-999999995)0)99995))
,/:99999999999995)0999995
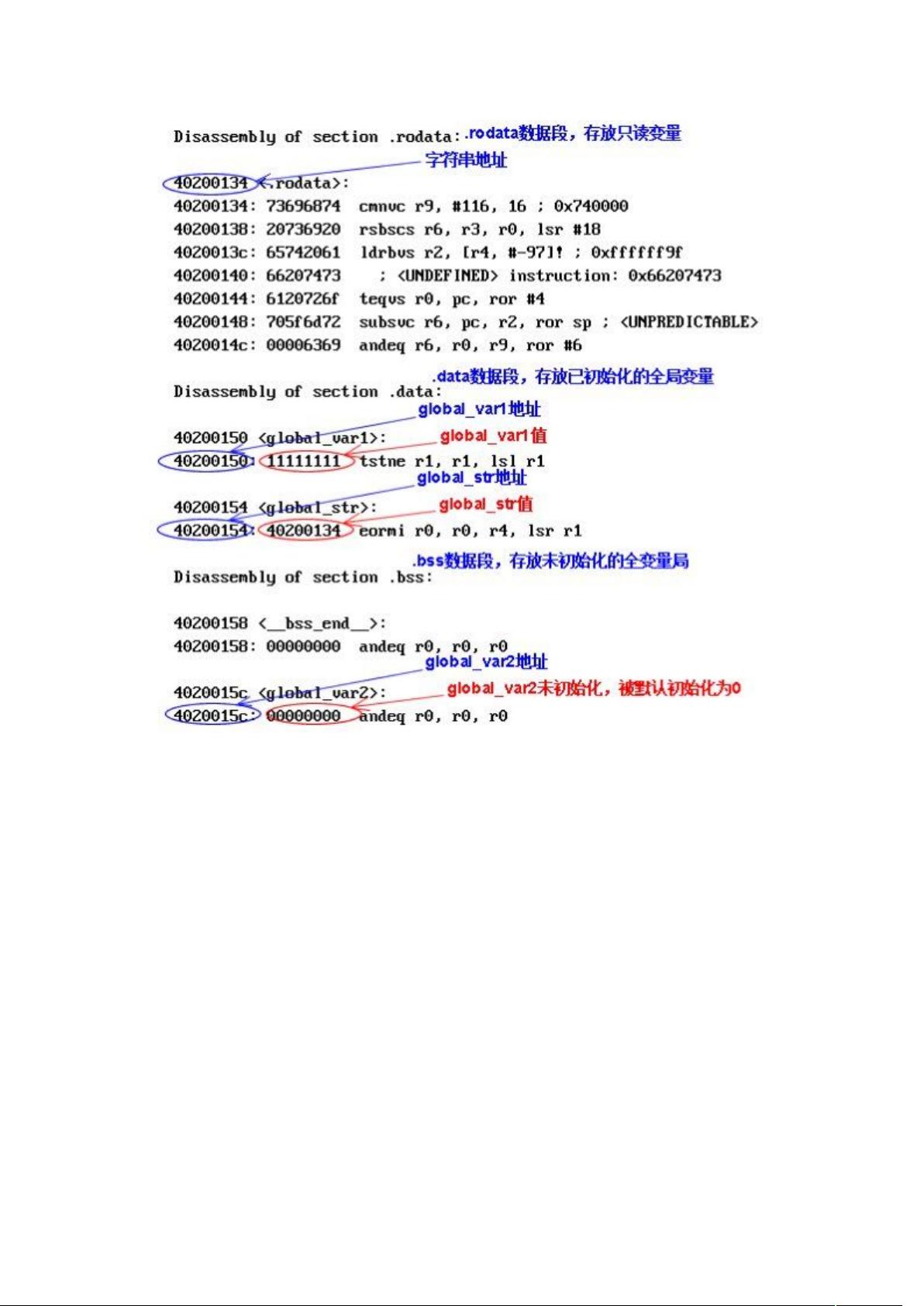
可以看到 ,/:,,/ 是已初始化的全局变量,被存放在- 数据段中,
其中 ,/: 的初始值为 5。,/ 初始值为 5)),在
& 中,,/ 被定义为一个指针,其初始值 5)) 应该是一个地址值,
仔细观察可以发现,5)) 地址的内存空间所存放的数据正是字符串”
4&/'7(字符串为只读数据,存放在- 数据段),这与 & 中
,/ 的定义一致,既 ,/ 指向字 符串”4
&/'7。,/: 是未初始化全局变量,存放在 数据段中,被默认初始化为
5。好像标漏了一个变量 ,/-/,,不知读者看出它在哪里了吗?
,/-/, 是一个未被初始化的全局变量,所以它应该落 在 数据段中,它
剩余10页未读,继续阅读
2017-08-24 上传
2021-09-29 上传
2008-10-19 上传
2010-10-16 上传
2009-02-11 上传
2008-06-11 上传
2022-01-04 上传
2011-02-28 上传
2008-06-24 上传

blog.pytool.com
- 粉丝: 9492
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索AVL树算法:以Faculdade Senac Porto Alegre实践为例
- 小学语文教学新工具:创新黑板设计解析
- Minecraft服务器管理新插件ServerForms发布
- MATLAB基因网络模型代码实现及开源分享
- 全方位技术项目源码合集:***报名系统
- Phalcon框架实战案例分析
- MATLAB与Python结合实现短期电力负荷预测的DAT300项目解析
- 市场营销教学专用查询装置设计方案
- 随身WiFi高通210 MS8909设备的Root引导文件破解攻略
- 实现服务器端级联:modella与leveldb适配器的应用
- Oracle Linux安装必备依赖包清单与步骤
- Shyer项目:寻找喜欢的聊天伙伴
- MEAN堆栈入门项目: postings-app
- 在线WPS办公功能全接触及应用示例
- 新型带储订盒订书机设计文档
- VB多媒体教学演示系统源代码及技术项目资源大全
