高效蛙跳算法:多目标柔性作业车间调度的解决方案
71 浏览量
更新于2024-07-14
收藏 784KB PDF 举报
本文主要探讨了"解决多目标柔性作业车间调度问题的一种有效的改组蛙跳算法"这一研究领域。该领域的研究论文由Junqing Lia等人撰写,他们分别来自中国聊城大学计算机学院、华中科技大学数字制造装备与技术国家重点实验室以及东北大学过程综合自动化国家重点实验室。柔性作业车间调度问题是一个复杂且具有挑战性的优化问题,它涉及到多个目标的平衡,如最小化最大完成时间(即Makespan)、降低所有机器的总工作量以及关键机器的工作负荷。
在论文中,作者提出了一个创新的混合型shuffle frog-leaping algorithm (HSFLA),这是一个多目标优化方法,旨在同时考虑三个主要目标。shuffle frog-leaping algorithm 是一种启发式搜索算法,其灵感来源于生物进化中的蛙跳行为,能够有效地探索解空间,并在寻找最优解的过程中保持一定的多样性。
在算法设计中,作者强调了初始种群的质量构建。这涉及到了一系列策略,如高级别的搜索策略和有效的编码技术,确保种群中个体的初始性能良好。每个"蛙"(或个体)被分配到特定的任务序列,这个序列需要经过适应性评估,以便于算法迭代过程中不断优化。
HSFLA通过动态调整步长、适应度函数的权重以及交叉和变异操作,使得算法能够在满足一个目标的同时,尽量减少对其他目标的影响,从而形成一个非劣解的Pareto前沿集合,即所谓的Pareto最优解集。这种方法有助于找到多个目标之间的权衡点,为多目标柔性作业车间调度提供了一个实用且高效的解决方案。
这篇论文不仅提出了一种新颖的算法框架,还展示了如何将生物启发式搜索方法应用于实际工业生产环境中的复杂调度问题,对于提升柔性作业车间的生产效率和资源利用率具有重要的理论和实践意义。对于从事多目标优化、生产调度或者生物启发式算法研究的学者和工程师来说,这篇文章提供了有价值的研究参考和实践指导。
solution for the given problem is shown in Fig. 2 (a), while Fig. 2 (b) illustrates a Gantt chart for the solution. The solution in
Fig. 2, in this study, is represented by a vector {1 2 1 3 2 2 | 1 1 2 3 3 2}. The first part {1 2 1 3 2 2} is the machine assignment
component, while the second part {1 1 2332}isthescheduling component. In the above example solution, the machine
assignment component {1 2 1 3 2 2} tells that the assignment machines for each operation are hO
11
,M
1
i, hO
12
,M
2
i, hO
21
,M
1
i,
hO
22
,M
3
i, hO
31
,M
2
i, and hO
32
,M
2
i, respectively. That is, M
1
is selected for processing O
11
, M
2
is assigned for processing O
12
, and
so on. The scheduling component {1 12332}tells that the scheduling sequence is {O
11
O
12
O
21
O
31
O
32
O
22
}. That
is, O
11
is the first operation to be scheduled, while the last operation to be scheduled is O
22
.
5.2. Population initialization
To generate an initial population with high level of solution quality and diversity, several following initial rules are uti-
lized in the hybrid algorithm.
5.2.1. Machine assignment component initial rules
Considered both the problem features and objectives, two initialization rules for the machine assignment component are
introduced in the hybrid algorithm as follows:
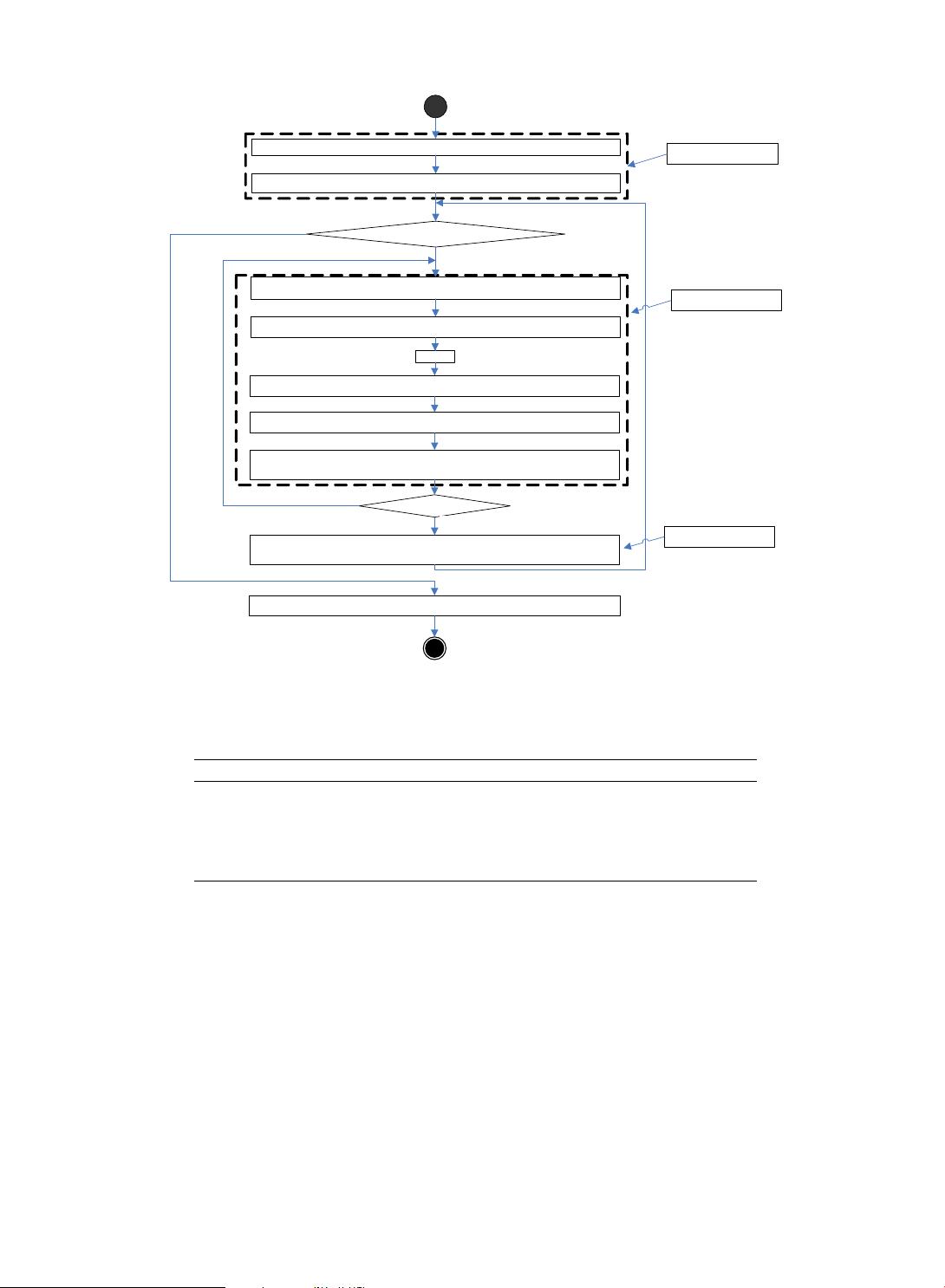
N
N
Set system parameters
Randomly generate an initial population with length equals to S
Is the stop criteria satisfied?
Output the best solutions found so far
Evaluate each frog in the population and sort them
Divide the population into several memeplexes
k=0
Determine the best and worst frog
Improve the worst frog u(w)
If no improvement becomes possible in this case, then replace u(w)
with a randomly generated frog
k>Mc?
Combine all frogs in each memeplex into a new population
Y
Y
Initialize phase
Evolution phase
Shuffling phase
Fig. 1. Flowchart of the basic SFLA.
Table 1
Processing time table for an example problem.
M
1
M
2
M
3
O
11
510 6
O
12
732
O
21
51512
O
22
810 1
O
31
12 3 8
O
32
745
9356 J. Li et al. / Applied Mathematics and Computation 218 (2012) 9353–9371
剩余18页未读,继续阅读
2021-03-08 上传
2023-11-07 上传
点击了解资源详情
点击了解资源详情
2021-05-06 上传
2021-05-29 上传
2023-11-07 上传

weixin_38688352
- 粉丝: 4
- 资源: 909
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新代数控API接口实现CNC数据采集技术解析
- Java版Window任务管理器的设计与实现
- 响应式网页模板及前端源码合集:HTML、CSS、JS与H5
- 可爱贪吃蛇动画特效的Canvas实现教程
- 微信小程序婚礼邀请函教程
- SOCR UCLA WebGis修改:整合世界银行数据
- BUPT计网课程设计:实现具有中继转发功能的DNS服务器
- C# Winform记事本工具开发教程与功能介绍
- 移动端自适应H5网页模板与前端源码包
- Logadm日志管理工具:创建与删除日志条目的详细指南
- 双日记微信小程序开源项目-百度地图集成
- ThreeJS天空盒素材集锦 35+ 优质效果
- 百度地图Java源码深度解析:GoogleDapper中文翻译与应用
- Linux系统调查工具:BashScripts脚本集合
- Kubernetes v1.20 完整二进制安装指南与脚本
- 百度地图开发java源码-KSYMediaPlayerKit_Android库更新与使用说明
