机器人工具设定与安装:从库加载到自定义创建
版权申诉
27 浏览量
更新于2024-07-04
收藏 60.87MB PPTX 举报
"此资源主要讲解了在工业机器人离线编程与仿真的项目中,如何使用RobotStudio进行工具的加载和创建。重点在于理解和操作机器人工具的设置,包括工具的属性、安装方法以及在不同工作场景下的定义。"
在工业机器人领域,离线编程与仿真是一项重要的技术,它允许工程师在真实环境之外对机器人程序进行设计和测试。RobotStudio是一款广泛使用的仿真软件,它提供了丰富的功能,如加载工具和创建自定义工具。在“加载机器人的工具”这一主题中,主要涉及以下几个知识点:
1. 系统库工具的加载:
- 系统库中的工具具备完整的工具数据(mytool),可以直接安装,无需额外定义。
- 工具数据支持多TCP(工具中心点),这意味着一个工具可以有多个有效的工作点。
- 安装技巧包括通过拖动或右键菜单将工具安装到指定对象上,实现快速定位。
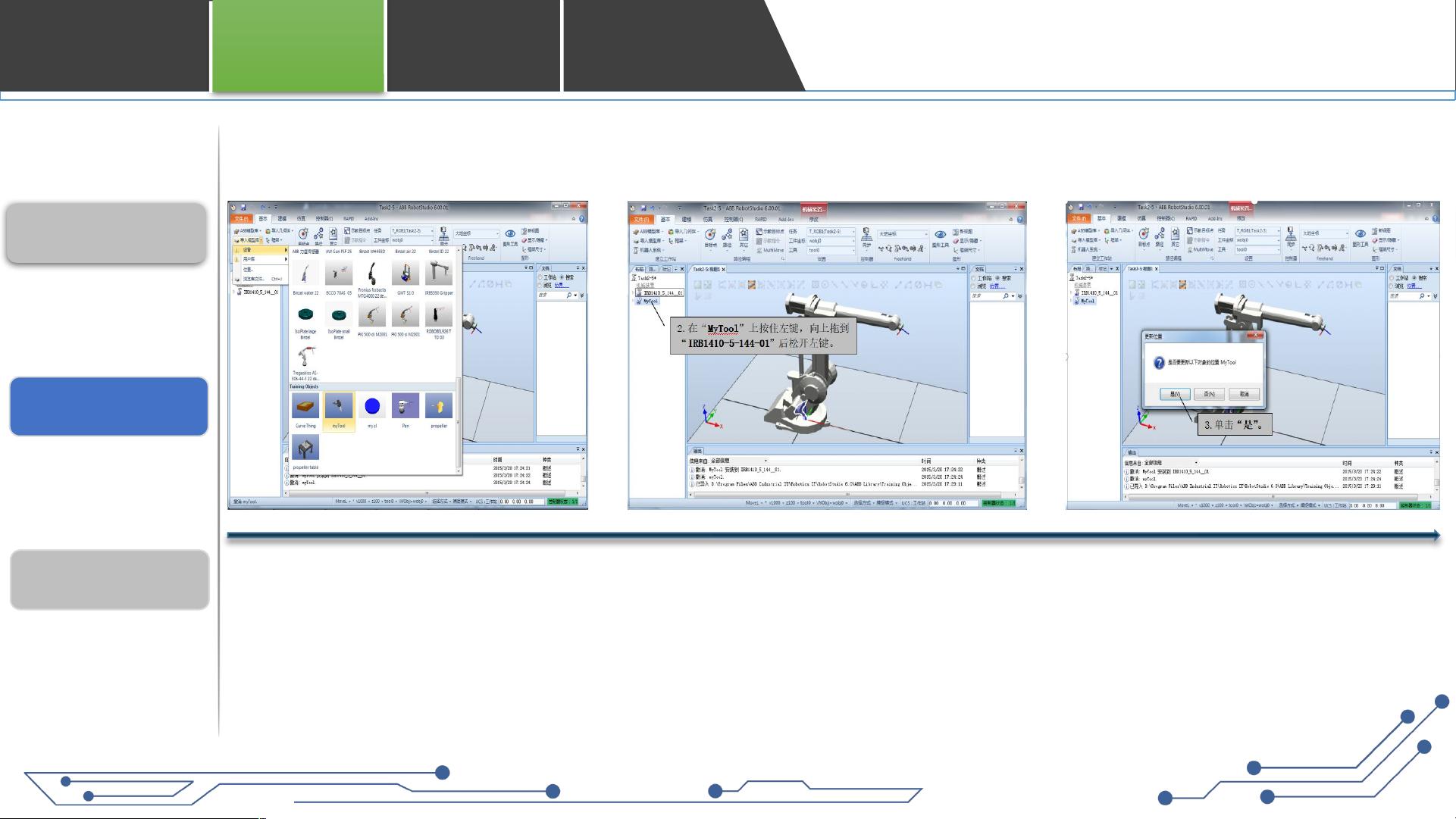
2. 创建机器人用工具:
- 机器人工具的特点包括法兰面和底板面保持平行,工具与参考坐标系的相对位置,以及工具TCP数据的定义。
- 创建自定义工具时,首先需要分析工艺要求,然后进行试安装,再配置并设计工具姿态和数据,最后进行安装。
- 在设计工具安装姿态时,需确保工具模型的本地坐标系与机器人法兰盘坐标系Tool0重合,且工具的本地原点位置与Tool0的原点保持一致,XYZ轴方向也需一致。
3. 工具的属性和安装:
- 工具的本地原点在设计时具有工程意义,它是机器人计算动作的基础。
- 末端操作器的工艺类型、连接位置和姿态是安装工具时要考虑的关键因素。
- 快换技术使得末端操作器可以快速更换,适应不同的工作任务,如A点提到的末端操作器与本体的相对位置、驱动类型等。
4. 创建自定义工具时遇到的问题和解决方法:
- 由于3D模型可能来自不同软件,导入时可能会丢失特征或坐标系不适用,需要调整工具模型的本地坐标系以匹配RobotStudio。
- 工具在仿真环境中应遵循一定的放置原则,如法兰面与大地水平,工具末端沿X轴负方向,本地原点与大地坐标方向一致。
5. TCP(工具中心点)的设定:
- TCP对于不同类型的工具如弧焊焊枪、夹爪和点焊焊枪,其位置和本地原点位置都有特定的要求,比如焊枪的TCP点通常位于断面垂直方向,且距离端面一定距离。
掌握这些知识和技能对于工业机器人程序员来说至关重要,能够确保机器人在执行任务时精确、高效地运行。通过学习和实践,工程师可以更好地利用RobotStudio进行复杂任务的离线编程和仿真,提升工作效率和工作质量。
知识应用
知识导图
知识讲解
课堂导入 新知学习 训练巩固 评价总结
项目 2 RobotStudio 仿真技术知识储
备
任务 2-5 加载机器人的工具
4 、创建自定义工具基本思路
1 2 3 4 5 6
分析工艺要求 试安装 创建工具配置
设计工具姿态 设计工具数据 安装工具
二、创建机器人用工具
剩余35页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-11-01 上传
2021-10-06 上传
2021-10-04 上传
2021-10-08 上传
2021-10-04 上传
2021-10-05 上传

知识世界
- 粉丝: 375
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- nanonote:一种简约的笔记应用程序
- IT-manuale-del-software-developer:软件开发人员指南
- TrackingDoc-crx插件
- C_Repository:C ++代码
- tsv2vcf-开源
- pandas_gbq_magic-1.1.2.tar.gz
- apollo-ps3:阿波罗保存工具(PS3)
- snews v1.7.1 英文版
- rmt:SUSE Customer Center的RPM存储库镜像工具和注册代理
- my_vim:我的vimrc
- RebootInBot
- dmnmgr-client:DMN管理器-具有附加功能的DMN编辑器,例如验证,模拟和基本git支持
- pandas_genomics-0.12.0.tar.gz
- 参考资料-基于STC单片机的电动客车空调控制系统设计.zip
- 金蝶虚拟机补丁-编码:#13397609虚拟机补丁.zip
- ToyChat-开源
