Σ-Δ转换器在电机控制中的应用与优化
需积分: 9 40 浏览量
更新于2024-09-07
收藏 793KB PDF 举报
"ADI的文章探讨了Σ-Δ模数转换器在电机控制中的应用,强调了如何充分利用这种技术以实现最佳性能。文章主要关注使用Σ-Δ转换器进行隔离相电流测量的方法,这是3相电机驱动中的高精度选择。"
Σ-Δ转换器是一种模拟到数字的转换技术,广泛应用于需要高信号完整性和电隔离的电机驱动系统。这种技术以其独特的过采样和噪声整形能力而闻名,可以提供高分辨率和出色的信噪比。然而,尽管Σ-Δ转换器的基本原理被广泛理解,但在实际应用中,往往未能充分发挥其潜力。
在3相电机驱动的隔离相电流测量中,有几种常见的技术,包括使用隔离传感器(如霍尔效应传感器或电流互感器)与放大器、电阻分流器配合隔离放大器,以及电阻分流器配合隔离Σ-ΔADC。在这三种方法中,Σ-Δ转换器通常被认为是最高性能的选择,尤其适用于变频电机驱动和伺服应用。
Σ-Δ转换器的优势在于它们能够提供高精度的电流测量,这对于电机控制至关重要。通过使用Σ-Δ架构,可以在不牺牲性能的情况下实现电气隔离,这在电机驱动中是必要的,因为需要保护电路免受高压和噪声的影响。此外,Σ-Δ转换器的过采样特性允许它在低分辨率硬件上实现高分辨率的测量,这有助于降低成本和复杂性。
文章深入讨论了如何在电机驱动设计中优化Σ-ΔADC的性能。这可能涉及调整转换器的采样率、选择适当的数字滤波器配置,以及优化前端信号调理,以确保最佳的信号质量和动态范围。对于电机控制应用,特别关注的是实时性能和稳定性,因此,正确配置Σ-Δ转换器以适应快速变化的电机条件至关重要。
总结来说,ADI的文章旨在教育工程师如何在电机控制中更有效地利用Σ-Δ转换器,揭示了如何通过优化应用设计来最大化这种技术的优势。这包括选择合适的转换器参数、实施有效的信号处理策略,以及理解如何在实际系统中集成这些组件,以实现更高效、更可靠的电机控制解决方案。通过深入理解Σ-Δ转换器的工作原理和应用技巧,设计师能够开发出满足严格性能要求的电机驱动系统。
SIGMA-DELTA
CONVERSION USED
FOR MOTOR CONTROL
Jens Sorensen
Analog Devices
Visit analog.com
TECHNICAL ARTICLE
Abstract
Ʃ-Δ analog-to-digital converters are widely used in motor drives
where high signal integrity and galvanic isolation are required.
While the Σ-Δ technology itself is well understood, the converters
are often used in ways that fail to unlock the full potential of the
technology. This article looks at Σ-Δ ADCs from an application
point of view and discusses how to get the best performance in a
motor drive.
Introduction
When it comes to isolated phase current measurement in a 3-phase motor
drive, there are several technologies to choose from. Three popular methods
are outlined in Figure 1; an isolated sensor, such as a Hall effect or current
transformer, combined with an amplifier, a resistive shunt combined with an
isolation amplifier, and a resistive shunt combined with an isolating Σ-Δ ADC.
Figure 1. Common current measurement technologies for 3-phase motor drives.
This article focuses on the highest performing method—Σ-Δ conversion.
Typically, Σ-Δ ADCs target variable frequency motor drives and servo
applications where high signal quality and galvanic isolation are required.
Along with the ADC comes demodulation and filtering, which are typically
handled by an FIR filter such as a 3
rd
-order sinc filter
(
sinc3
)
.
A Σ-Δ ADC has the lowest possible resolution of 1 bit, but through oversam-
pling, noise shaping, digital filtering, and decimation, very high signal quality
can be achieved. The theory behind Σ-Δ ADCs and sinc filters is well under-
stood and well documented,
1, 2
so it will not be discussed in this article. Rather,
the focus will be on how to get the best performance in a motor drive and how
to utilize the performance in the control algorithms.
Phase Current Measurement with Σ-Δ ADCs
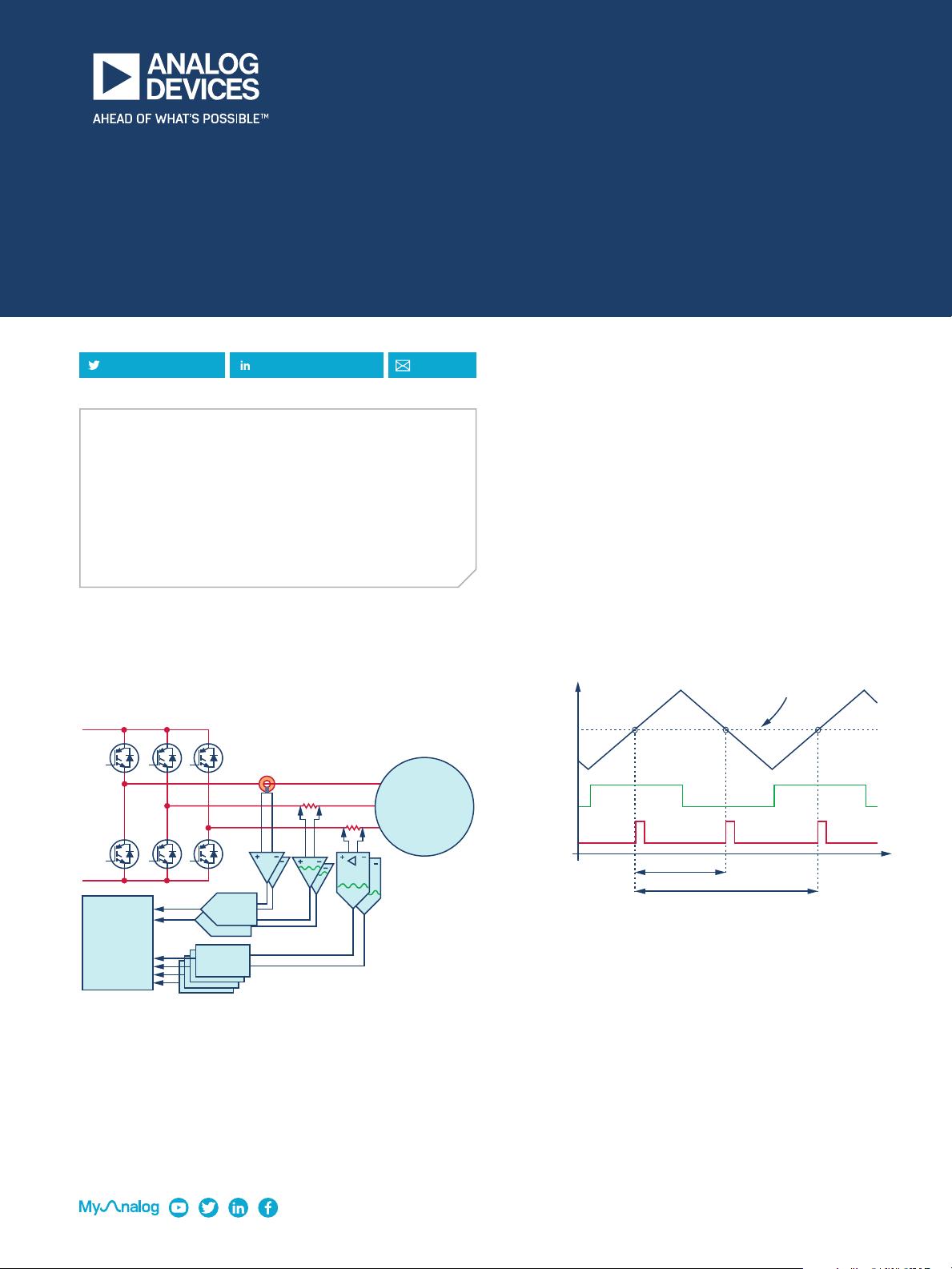
When a 3-phase motor is fed by a switching voltage source inverter, the
phase current can be seen as two components: an average component and
a switching component, as seen in Figure 2. The top signal shows one phase
current, the middle signal shows high-side PWM for the inverter phase-leg,
and the lower signal shows the sample synchronizing signal from the PWM
timer, PWM_SYNC. PWM_SYNC is asserted at the beginning and the center
of a PWM cycle and so it aligns with the midpoint of the current and voltage
ripple waveforms. For simplicity, it is assumed all three phases run with a duty
cycle of 50%, which means there is only one rising slope and one falling slope
of the current.
Figure 2. Phase current assumes average value at the beginning and center of
the PWM period.
For control purposes, only the average component of the current is of interest.
The most common way to extract the average component is to sample the
signal synchronized to PWM_SYNC. In these instances, the current assumes
its average value so if there is tight control of the sampling instant, under
sampling is possible without suffering from aliasing.
With conventional successive approximation
(
SAR
)
ADCs, sampling is done
by a dedicated sample-and-hold circuit giving the user tight control of the
sampling instant. Σ-Δ conversion, on the other hand, is a continuous sampling
process and other means of extracting the average value of the current are
Motor
Control
Algorithm
ADC
AC Motor
i
u
, i
v
, i
w
U
V
W
Σ
Sinc3
Average Current
Phase Current
High-Side PWM
PWM_SYNC
TimeT
SW
/2
T
SW
|
Share on Twitter
|
Share on LinkedIn
|
Email
下载后可阅读完整内容,剩余5页未读,立即下载
2014-04-25 上传
2022-09-24 上传
2022-07-14 上传
2021-04-02 上传
2022-09-19 上传
2022-09-21 上传
2020-04-17 上传
2021-10-05 上传









