基于STM32智能循迹避障小车设计报告详解
版权申诉
基于STM32智能循迹避障小车设计报告
《基于STM32智能循迹避障小车设计报告》以STM32为控制核心,利用红外线传感器检测道路上的轨迹和超声波传感器检测障碍,实现了电动小车的自动循迹和避障、快慢速行驶以及自动停车。整个系统的电路结构简单,可靠性能高。通过实验测试,系统的性能满足了设计要求。本文主要介绍了该系统的硬件设计方法及测试结果分析,包括对STM32芯片、PWM调速、电动小车、红外对管、循迹、避障以及MDK(keil)软件的应用。文章以此为背景,文中首先介绍了智能电动小车设计的背景和意义,指出了其在汽车工业及各类电子竞赛中的重要性。接着对实验的目的进行了概要的阐述,最后详细阐述了该智能电动小车的设计方案,并对设计方案进行了分析和讨论。
设计报告首先介绍了智能电动小车设计的背景和意义。随着汽车工业的迅速发展,智能电动小车的研究也日益受到关注。在全国各高校和电子竞赛中,智能电动小车成为了热门的研究课题。指导教师在该方面已经有充分的准备,为此次设计提供了充分的支持。设计的智能电动小车具备自动寻迹、避障、可程控行驶速度等功能,具有重要的研究意义。
接着,设计报告概要阐述了实验的目的。为了实现自动循迹和避障等功能,设计报告确定了在现有玩具电动车的基础上,加红外线传感器和超声波传感器的设计方案。红外线传感器用于检测道路上的轨迹,而超声波传感器用于检测障碍物。通过对这些传感器采集的数据进行分析,可以实现对电动车的速度、运行状态等的控制,从而实现自动循迹和避障。
设计报告详细阐述了智能电动小车的设计方案,并对设计方案进行了分析和讨论。设计报告采用STM32作为控制核心,通过编程来控制小车的速度。同时,红外线传感器和超声波传感器的有效应用是实现自动循迹和避障的关键。在电路设计方面,采用了新型芯片,整个系统的电路结构简单且可靠性能高。通过对该系统进行了实验测试,测试结果满足了设计要求。
综上所述,《基于STM32智能循迹避障小车设计报告》详细阐述了该系统的硬件设计方法及测试结果分析,介绍了在该设计中采用的技术和关键器件。整个设计报告充分论证了该智能电动小车系统的可行性和有效性,为相关领域的研究提供了有益的参考。
行车起始、终点及光线检测:
本系统采用反射式红外线光电传感器用于检测路面的起始、终点(黑线),玩具车底盘上沿黑
线放置,以适应起始的记数开始和终点的停车的需要。
行车方向检测电路采用反射接收原理配置了一对红外线发射、接收传感器。该电路包括一个红
外发光二极管、一个红外光敏三极管及其上拉电阻。红外发光二极管发射一定强度的红外线照射物
体,红外光敏三极管在接收到反射回来的红外线后导通,发出一个电平跳变信号。此套红外光电传
感器固定在底盘前沿,贴近地面。正常行驶时,发射管发射红外光照射地面,光线经白纸反射后被
接收管接收,输出高电平信号;电动车经过黑线时,发射端发射的光线被黑线吸收,接收端接收不
到反射光线,传感器输出低电平信号后送 stm32 进行处理,判断执行哪一种预先编制的程序来控制
玩具车的行驶状态。前进时,驱动轮直流电机正转,进入减速区时,由单片机控制进行 PWM 变频调
速,通过软件改变脉冲调宽波形的占空比,实现调速。最后经反接制动实现停车。前行与倒车控制电
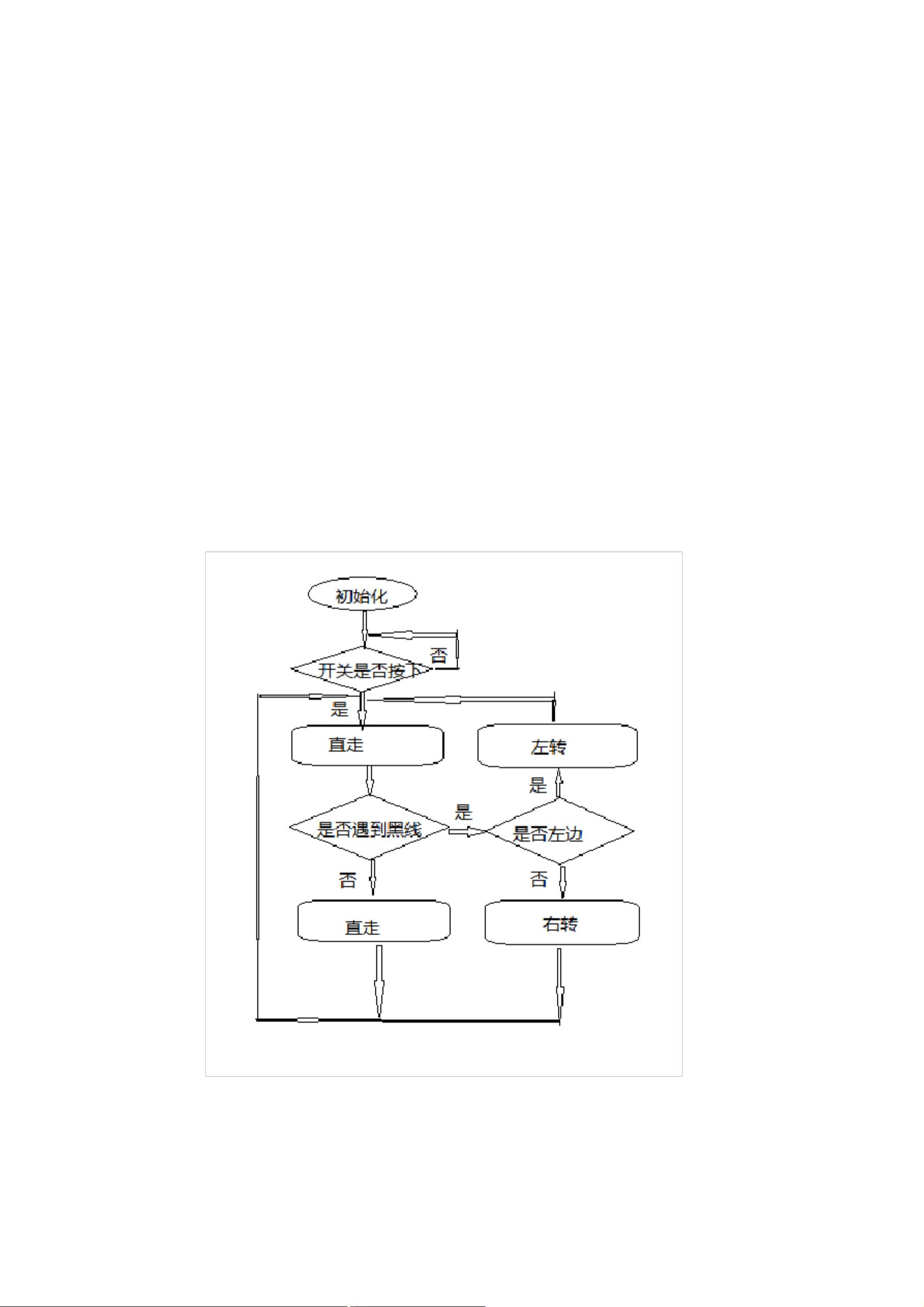
路的核心是桥式电路和继电器。电桥上设置有两组开关,一组常闭,另一组常开。方案设计流程图
如下图所示:
剩余19页未读,继续阅读
2020-04-03 上传
2013-05-09 上传
2022-07-01 上传
2021-06-27 上传
点击了解资源详情
2022-05-21 上传
2023-04-27 上传
2023-02-27 上传

คิดถึง643
- 粉丝: 4025
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
