STM32单片机视频遥控小车:驱动、传输与控制详解
126 浏览量
更新于2024-09-03
3
收藏 190KB PDF 举报
本文档详细探讨了一种基于STM32单片机的视频遥控小车的设计,它代表了现代自动化和智能遥控技术的结合。随着科技的发展,智能小车研究已成为移动机器人领域的一个重要分支,涉及计算机技术、传感技术、通讯技术等多个技术领域。
该设计的核心组件是STM32单片机,它作为主控制器,负责处理底层的驱动控制和通信任务。小车的主要功能是通过无线网络视频技术,实现实时路径识别、速度控制和转向操作。其中,RT5350 Wi-Fi射频模块负责视频数据的无线传输,使得用户可以从远程进行实时监控和操控。
实现视频遥控小车的方法分为三个层次:
1. 底层驱动层:STM32单片机通过L298N电机驱动模块驱动小车的直流电机。通过精确的数字信号控制,如正转、反转和停止,驱动电机实现小车的移动。电路设计包括连接电机控制信号线和PWM调速信号线,确保电机根据指令进行高效运作。
2. 中层传输层:RT5350路由器平台在这个层次起到关键作用,它负责将控制命令和视频流从STM32单片机发送到接收端,实现远程通信和数据传输。这涉及到无线网络技术,如Wi-Fi协议,确保数据的稳定传输。
3. 顶层控制层:在Windows平台上,开发了一个上位机软件,用户可以通过图形界面或编程接口对小车进行精细控制。这涉及到软件开发技能,如GUI设计、通信协议理解和编程实现。
整个项目不仅考验了开发者对STM32单片机硬件的理解,还涉及到了嵌入式系统、网络通信、无线传输、Linux系统(如OpenWrt)以及Windows环境下的软件开发。因此,这个设计项目是理论与实践相结合,具有较高的技术含量和学习价值。
一种基于一种基于STM32单片机的视频遥控小车的设计单片机的视频遥控小车的设计
随着各种科学技术的不断提高,自动化技术的不断加深,智能遥控技术将跨领域应用,并深入普及。机器人小
车的研究是移动机器人分支的一部分,是一项涉及到计算机技术、传感技术、通讯技术等相关技术的综合系
统。它的主要功能是利用无线网络视频技术实现识别路径,控制车速及操纵转向等。小车采用STM32单片机作
为主制器,通过一款Wifi射频模块RT5350实现远程视频画面的传输,整个项目涵盖的知识面广,包括单片机编
程技术,OpenWrt路由器系统以及Windows上位机软件开发等等不同技术领域。下面分为三个层面来介绍视频
小车的实现方法:(1)底层驱动层:以STM32单片机实现对小车的驱动控制;(2)中层传输层:借助
随着各种科学技术的不断提高,自动化技术的不断加深,智能遥控技术将跨领域应用,并深入普及。机器人小车的研究是
移动机器人分支的一部分,是一项涉及到计算机技术、传感技术、通讯技术等相关技术的综合系统。它的主要功能是利用无线
网络视频技术实现识别路径,控制车速及操纵转向等。
小车采用STM32单片机作为主制器,通过一款Wifi射频模块RT5350实现远程视频画面的传输,整个项目涵盖的知识面
广,包括单片机编程技术,OpenWrt路由器系统以及Windows上位机软件开发等等不同技术领域。下面分为三个层面来介绍
视频小车的实现方法:
(1)底层驱动层:以STM32单片机实现对小车的驱动控制;
(2)中层传输层:借助RT5350路由器平台传输控制命令以及视频流;
(3)顶层控制层:在Windows平台实现对小车的控制。
1、底层驱动层、底层驱动层
小车整体是实现STM32单片机控制小车电机的运动和控制摄像头的舵机云台的运动。由于STM32单片机提供的电流非常
微小,不足以让小车动起来,所以需要电机驱动模块,这里使用了L298N模块驱动小车的直流电机。
1..1、电机驱动原理、电机驱动原理
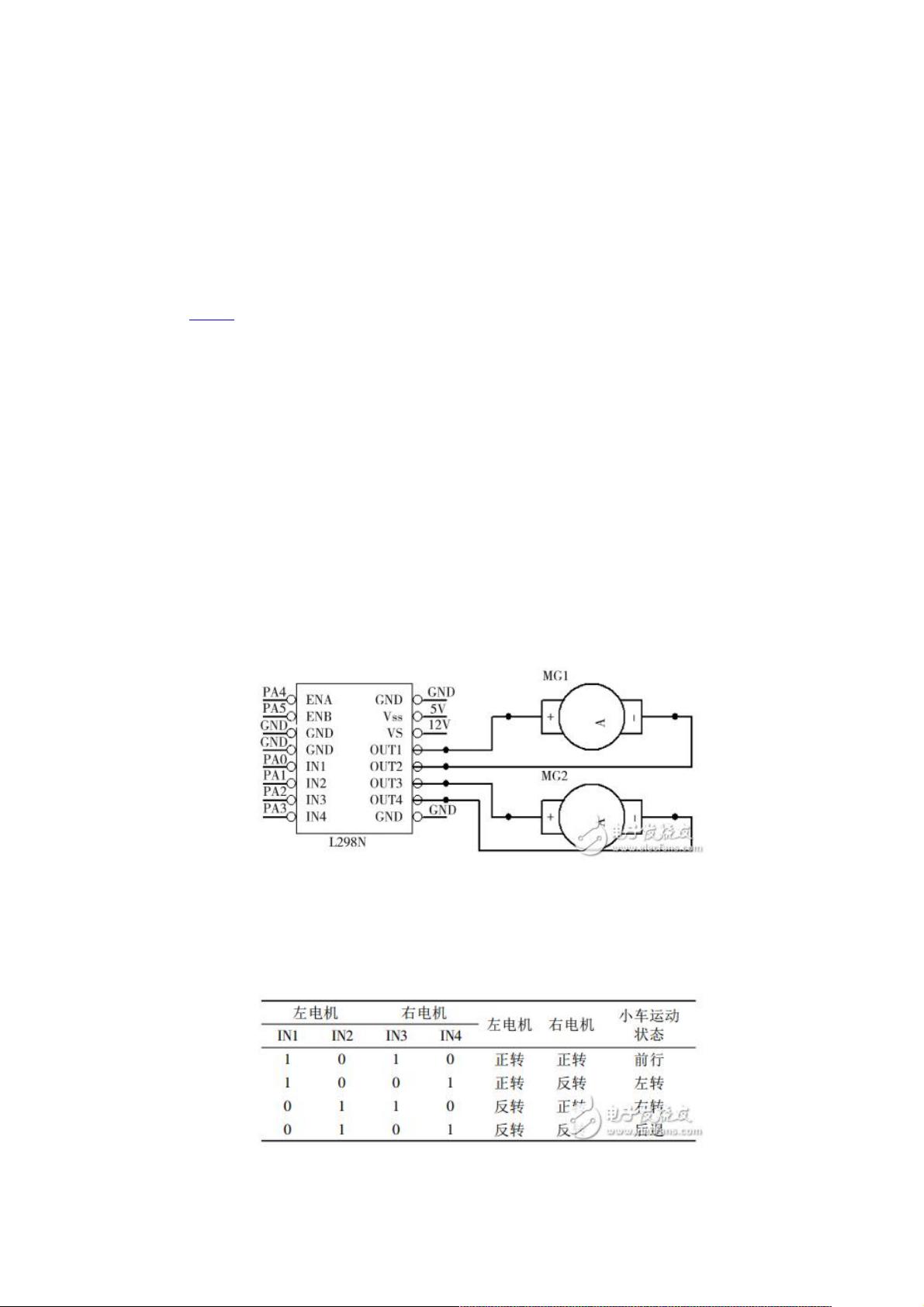
小车左轮右轮上分别配有两个电机,左轮电机A与右轮电机B的正转、反转和停止决定着小车的运动模式。而STM32单片
机4根电机控制信号线连接着L298N的IN1~IN4,另外两根PWM调速信号线连着ENA和ENB。电路图详情见图1。
图1 电路原理图
输入信号线IN1和IN2控制电机A的运动,直流电机A接OUT1和OUT2。同理,IN3和IN4合起来控制了电机B的运动。对应
小车的对应的运动模式详情见表1。
表1小车的对应的运动模式
1..2、电机调速原理、电机调速原理
如上图1中L298N上还有有ENA和ENB两个信号输入端口,这两个端口的作用是控制信号的使能,低电平有效。只有当信
号线拉低时候,L298N才会遵循表1中列出的运动模式。
下载后可阅读完整内容,剩余3页未读,立即下载
2018-12-08 上传
2019-04-06 上传
2021-10-16 上传
2021-06-30 上传
2021-10-16 上传
2024-06-14 上传
2022-03-01 上传

weixin_38591615
- 粉丝: 8
- 资源: 907
 我的内容管理
展开
我的内容管理
展开







最新资源
- iec61850:IEC 61850 协议实现
- PID-Control-System,数字转字符串c语言源码实现,c语言程序
- george-connect:George Connect-与您的同事保持联系
- device_xiaomi_phoenix:POCO X2Redmi K30的设备树
- portfolio
- hltv-rs:(WIP)非官方的HLTV Rust API
- github-slideshow:机器人提供动力的培训资料库
- TextComparer:文本比较器
- eslint-plugin-class-prefer-methods:eslint插件报告不需要的箭头功能而不是类方法的用法
- ARM-DEV,c语言生成xml格式的源码,c语言程序
- snapnet
- 软件开发项目企业官网模板
- Online-Music-Sharing
- 三色灯控制开发Demo
- mission-extract-bit
- son_jay:结构化数据和 JSON 之间的对称转换
