视觉-惯性单目SLAM系统:地图重用与零漂移定位
需积分: 13 156 浏览量
更新于2024-09-04
收藏 663KB PDF 举报
本文档探讨的是"视觉-惯性单目SLAM与地图重用"(Visual-Inertial Monocular SLAM with Map Reuse)的主题,该研究聚焦于解决视觉惯性测姿(Visual-Inertial Odometry, VIO)技术中的关键挑战。VIO在实时计算传感器的增量运动方面表现出色,具有高精度和鲁棒性,但它们往往无法形成闭环,导致在重复访问同一位置时,累积的位姿漂移问题难以避免。
作者提出了一种新颖的紧密耦合的视觉-惯性同时定位与建图(Simultaneous Localization and Mapping, SLAM)系统,旨在解决这一局限。这个系统能够在已知区域实现零漂移定位,通过利用先前构建的地图来封闭循环,显著改善了长期定位的稳定性。由于讨论的是单目摄像头,文中特别关注了其众所周知的尺度不确定性,这是单目SLAM中的一个核心难题。
创新之处在于,论文提出了一种新的IMU初始化方法,能在几秒钟内精确地估计尺度因子、重力方向、速度以及陀螺仪和加速度计的偏置,这对于提高整个系统的性能至关重要。测试是在最近的一个微型无人机公共数据集中进行的,其中11个序列展示了该方法的优越性,实现了典型的尺度误差仅为1%,并且定位精度达到了厘米级。
对比现有的视觉-惯性 odometry 方法,特别是在涉及重复访问的序列中,该文强调了地图重用和无漂移积累的优势,证明了作者的方法在准确性和稳定性上具有明显提升。因此,这项工作不仅提升了单目视觉-惯性SLAM的性能,还为实际应用,如无人机导航或机器人自主定位提供了重要的改进方案。
Visual-Inertial Monocular SLAM with Map Reuse
Ra
´
ul Mur-Artal and Juan D. Tard
´
os
Abstract— In recent years there have been excellent results
in Visual-Inertial Odometry techniques, which aim to compute
the incremental motion of the sensor with high accuracy
and robustness. However these approaches lack the capability
to close loops, and trajectory estimation accumulates drift
even if the sensor is continually revisiting the same place. In
this work we present a novel tightly-coupled Visual-Inertial
Simultaneous Localization and Mapping system that is able to
close loops and reuse its map to achieve zero-drift localization in
already mapped areas. While our approach can be applied to
any camera configuration, we address here the most general
problem of a monocular camera, with its well-known scale
ambiguity. We also propose a novel IMU initialization method,
which computes the scale, the gravity direction, the velocity,
and gyroscope and accelerometer biases, in a few seconds with
high accuracy. We test our system in the 11 sequences of a
recent micro-aerial vehicle public dataset achieving a typical
scale factor error of 1% and centimeter precision. We compare
to the state-of-the-art in visual-inertial odometry in sequences
with revisiting, proving the better accuracy of our method due
to map reuse and no drift accumulation.
Index Terms— SLAM, Sensor Fusion, Visual-Based Naviga-
tion
I. INTRODUCTION
Motion estimation from onboard sensors is currently a
hot topic in Robotics and Computer Vision communities,
as it can enable emerging technologies such as autonomous
cars, augmented and virtual reality, service robots and drone
navigation. Among different sensor modalities, visual-inertial
setups provide a cheap solution with great potential. On the
one hand cameras provide rich information of the environ-
ment, which allows to build 3D models, localize the camera
and recognize already visited places. On the other hand IMU
sensors provide self-motion information, allowing to recover
metric scale for monocular vision, and to estimate gravity
direction, rendering absolute pitch and roll of the sensor.
Visual-inertial fusion has been a very active research
topic in the last years. The recent research is focus on
tightly-coupled (i.e. joint optimization of all sensor states)
visual-inertial odometry, using keyframe-based non-linear
optimization [1]–[4] or filtering [5]–[8]. Nevertheless these
approaches are only able to compute incremental motion
and lack the capability to close loops and reuse a map of
an already mapped environment. This implies that estimated
trajectory accumulates drift without bound, even if the sensor
is always localizing in the same environment. This is due to
This work was supported by the Spanish government under Project
DPI2015-67275, the Arag
´
on regional governmnet under Project DGA T04-
FSE and the Ministerio de Educaci
´
on Scholarship FPU13/04175.
The authors are with the Instituto de Investigaci
´
on en Ingenier
´
ıa de
Arag
´
on (I3A), Universidad de Zaragoza, Mar
´
ıa de Luna 1, 50018 Zaragoza,
Spain. Email: {raulmur,tardos}@unizar.es.
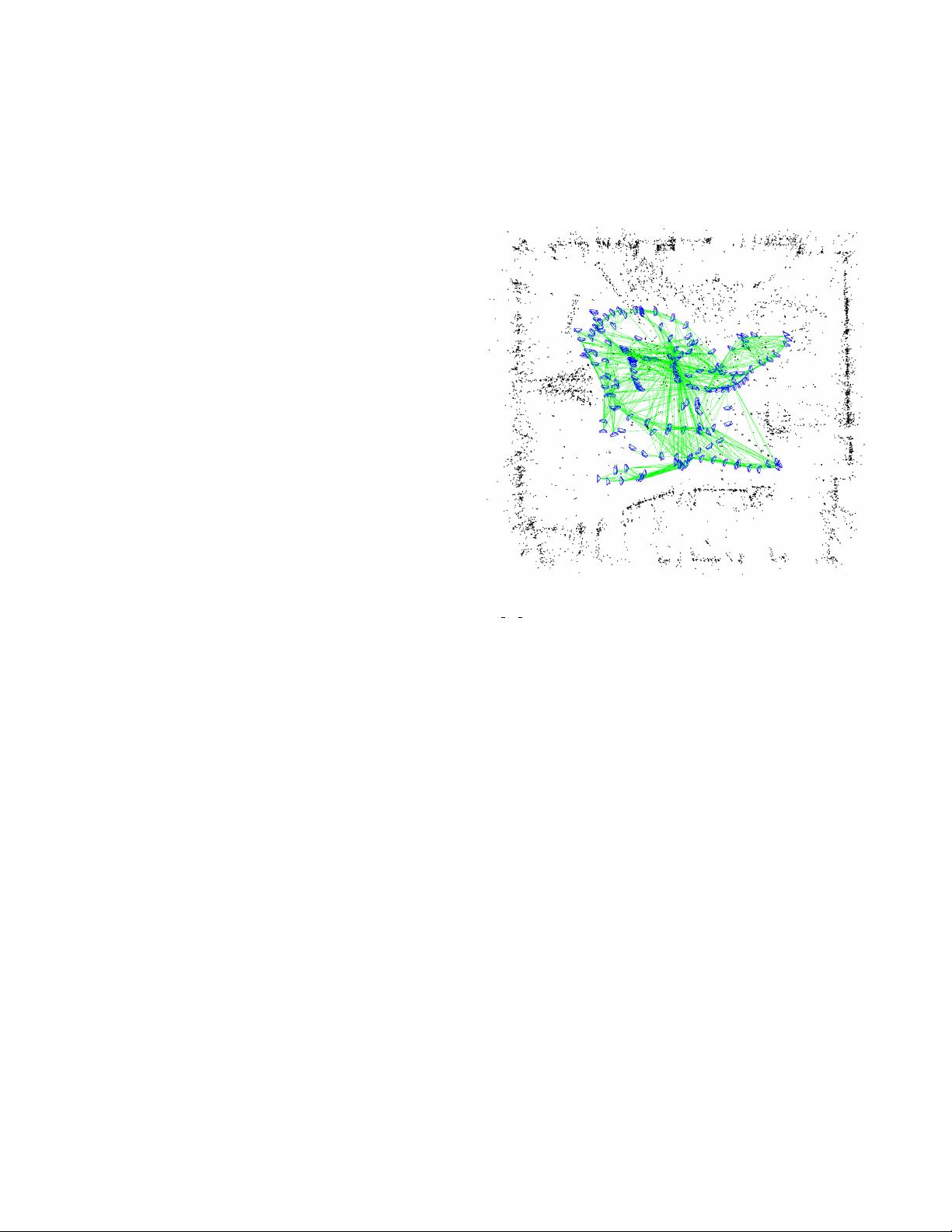
Fig. 1. Top view of the reconstruction built by our system from sequence
V1 02 medium of the EuRoC dataset [11]. This top view was aligned
using the gravity direction computed by Visual-Inertial ORB-SLAM. The
green lines connect keyframes that share more than 100 point observations
and are a proof of the capability of the system to reuse the map. This
reuse capability, in contrast to visual-inertial odometry, allows zero-drift
localization when continually revisiting the same place.
the use of the marginalization of past states to maintain a
constant computational cost [1], [2], [5]–[8], or the use of
full smoothing [3], with an almost constant complexity in
exploration but that can be as expensive as a batch method
in the presence of loop closures [9].
In this paper we present Visual-Inertial ORB-SLAM, to
the best of our knowledge the first keyframe-based Visual-
Inertial SLAM that is able to close loops and reuse its
map. Inspired by [10] our tracking optimizes current frame
assuming a fixed map, and our backend performs local
Bundle Adjustment (BA), optimizing a local window of
keyframes, including an outer window of fixed keyframes
that ensures global consistency. This approach allows for
a constant time local BA, in contrast to full smoothing,
and as not marginalizing past states we are able to reuse
them. We detect large loops using place recognition and a
lightweight pose-graph optimization, followed by full BA in
a separate thread not to interfere with real-time operation.
Fig. 1 shows the reconstruction of our system in a sequence
with continuous revisiting.
Both tracking and local BA work fixing states, which
could potentially bias the solution, therefore we need a
arXiv:1610.05949v1 [cs.RO] 19 Oct 2016
下载后可阅读完整内容,剩余7页未读,立即下载
204 浏览量
204 浏览量
2021-03-14 上传
2023-09-13 上传
299 浏览量
116 浏览量
105 浏览量
337 浏览量
2024-10-20 上传

山喵
- 粉丝: 15
 我的内容管理
展开
我的内容管理
展开







最新资源
- Web远程教学系统需求分析指南
- 禅道6.2版本发布,优化测试流程,提高安全性
- Netty传输层API中文文档及资源包免费下载
- 超凡搜索:引领搜索领域的创新神器
- JavaWeb租房系统实现与代码参考指南
- 老冀文章编辑工具v1.8:文章编辑的自动化解决方案
- MovieLens 1m数据集深度解析:数据库设计与电影属性
- TypeScript实现tca-flip-coins模拟硬币翻转算法
- Directshow实现多路视频采集与传输技术
- 百度editor实现无限制附件上传功能
- C语言二级上机模拟题与VC6.0完整版
- A*算法解决八数码问题:AI领域的经典案例
- Android版SeetaFace JNI程序实现人脸检测与对齐
- 热交换器效率提升技术手册
- WinCE平台CPU占用率精确测试工具介绍
- JavaScript实现的压缩包子算法解读
