双流残差网络:提升视觉目标跟踪鲁棒性与速度
需积分: 9 79 浏览量
更新于2024-09-04
收藏 3.48MB PDF 举报
本文主要探讨了"Robust Visual Object Tracking with Two-Stream Residual Convolutional Networks"这一主题,它是一种创新的深度学习方法,针对视觉对象跟踪中的挑战提出了新的解决方案。在当前基于深度学习的视觉跟踪技术广泛应用并取得显著成果的基础上,许多算法主要依赖于物体的外观特征进行目标识别和位置预测,但在面对密集背景干扰、混淆背景和运动模糊等复杂情况时,性能往往受限。
传统方法的不足在于仅依赖静态图像信息,而忽视了运动信息对区分目标与背景的重要作用。为了克服这些难题,研究者们受到人类视觉系统中利用运动线索进行目标跟踪能力的启发,设计了一种名为Two-Stream Residual Convolutional Network (TS-RCN)的新型架构。TS-RCN的关键在于将物体的表观特征(如颜色、纹理)与运动信息(如光流)相结合,通过双流结构进行模型的实时更新。这种方法不仅提高了跟踪的鲁棒性,而且有效地降低了由于目标与背景相似度高导致的误跟踪风险。
在VOT2018、VOT2019和GOT-10K等多个知名数据集上的实验结果显示,TS-RCN在性能上远超先前的算法,显示出其在复杂场景下的优越性能。值得一提的是,尽管具备强大的性能,TS-RCN的速度依然保持在38.1帧每秒,确保了实际应用中的高效性。这项工作背后的团队包括来自京东、咪咕文化科技和上海大学的研究人员,他们通过跨领域的合作,结合最新的深度学习技术和对人类视觉机制的理解,为视觉跟踪领域的技术发展做出了贡献。
总结来说,本文的核心知识点包括:
1. 强调了在视觉跟踪中同时考虑物体表观和运动信息的重要性。
2. 描述了Two-Stream Residual Convolutional Network (TS-RCN)的设计原理,即如何集成双流结构和残差网络来处理表观特征和运动特征。
3. 提供了TS-RCN在VOT竞赛中的优秀表现,证明了其在实际场景中的鲁棒性和速度优势。
4. 显示了跨领域合作在推动视觉跟踪技术进步中的作用,尤其是在处理复杂环境挑战时的有效性。
通过阅读这篇论文,读者可以深入了解如何将运动信息融入深度学习目标跟踪中,以及这种融合如何改善追踪性能并提升速度。这对于那些关注视觉跟踪算法改进或在该领域进行研究的人来说,是一篇值得深入研读的论文。
Robust Visual Object Tracking with Two-Stream
Residual Convolutional Networks
Ning Zhang
∗
, Jingen Liu
∗
, Ke Wang
†
, Dan Zeng
‡
and Tao Mei
§
∗
JD AI Research, Mountain View, USA.
†
Migu Culture & Technology, Beijing, China
‡
Shanghai University, Shanghai, China
§
JD AI Research, Beijing, China
∗
{ning.zhang,jingen.liu}@jd.com,
†
wangke@migu.cn,
‡
dzeng@shu.edu.cn,
§
tmei@live.com
Abstract—The current deep learning based visual tracking
approaches have been very successful by learning the target
classification and/or estimation model from a large amount
of supervised training data in offline mode. However, most
of them can still fail in tracking objects due to some more
challenging issues such as dense distractor objects, confusing
background, motion blurs, and so on. Inspired by the human
“visual tracking” capability which leverages motion cues to
distinguish the target from the background, we propose a Two-
Stream Residual Convolutional Network (TS-RCN) for visual
tracking, which successfully exploits both appearance and motion
features for model update. Our TS-RCN can be integrated with
existing deep learning based visual trackers. To further improve
the tracking performance, we adopt a “wider” residual network
ResNeXt as its feature extraction backbone. To the best of our
knowledge, TS-RCN is the first end-to-end trainable two-stream
visual tracking system, which makes full use of both appearance
and motion features of the target. We have extensively evaluated
the TS-RCN on most widely used benchmark datasets including
VOT2018, VOT2019, and GOT-10K. The experiment results have
successfully demonstrated that our two-stream model can greatly
outperform the appearance based tracker, and it also achieves
state-of-the-art performance. The tracking system can run at up
to 38.1 FPS.
I. INTRODUCTION
Generic visual object tracking predicts the location of a
class-agnostic object at every frame of a video sequence. It
is a highly challenging task due to its class-agnostic nature,
background distraction, illumination discrepancy, motion blur,
and many more [1], [2]. In general, a visual tracking system
needs to perform two tasks simultaneously: target classifica-
tion and bounding-box estimation [3]. The former task is to
coarsely identify the target object region in current frame from
the background, while the latter further estimates the precise
bounding-box (i.e., tracker state) of the target object.
Recently, researchers have made great progress in visual
object tracking by exploiting the effective power of deep
convolution networks. The Siamese tracking approaches [4]
leverage a large amount of supervised data to learn a more
general region similarity measurement in offline mode, which
enables tracking to be performed by searching image regions
most similar to the target template. Due to the lack of
background appearance (e.g., distractor objects ), however, the
Siamese approaches are inferior to deal with unseen objects
and distractor objects. To address these limits, Bhat et al. [5]
propose a discriminative learning architecture (DiMP) which
is able to fully exploit both target and background appearance.
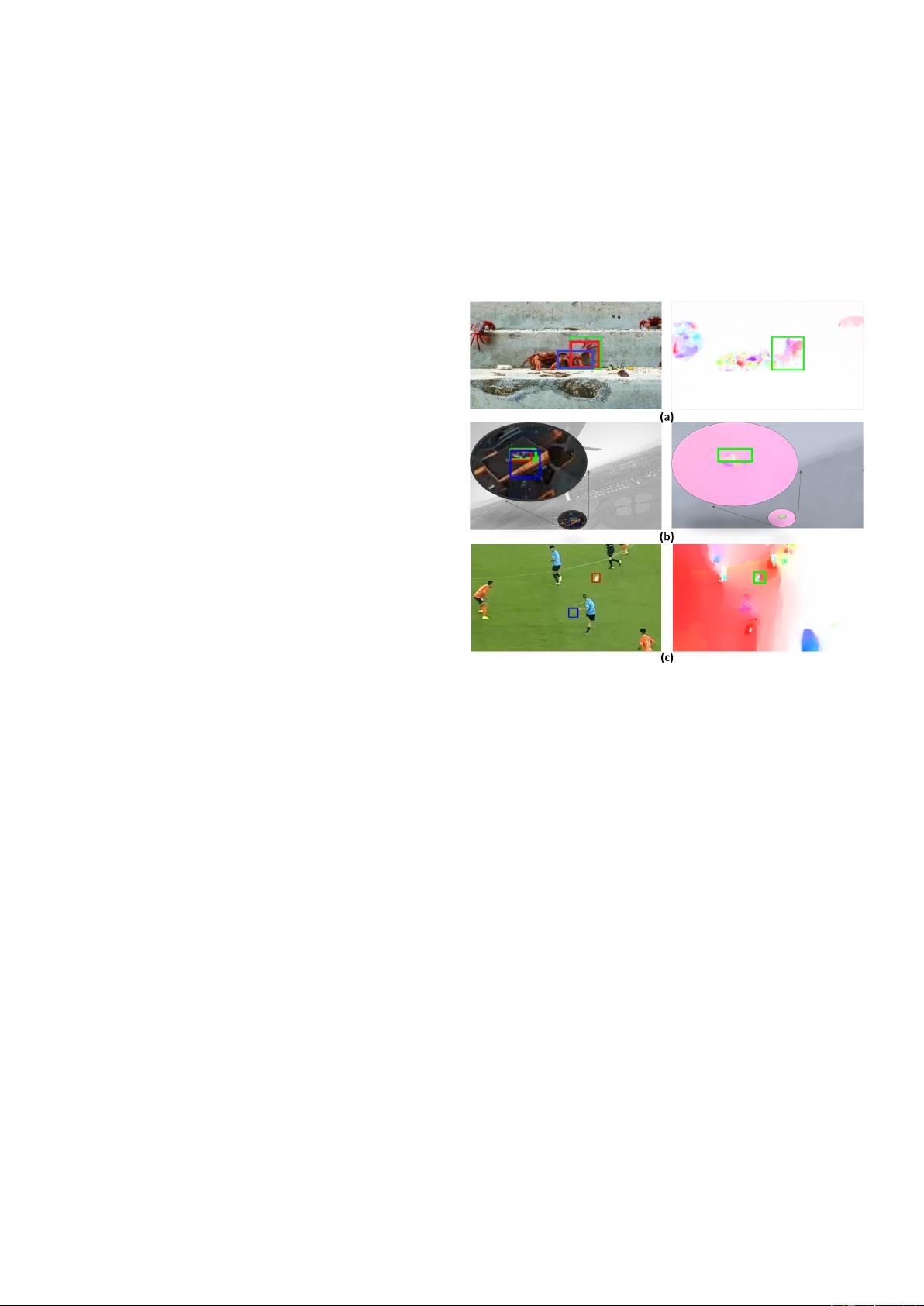
Fig. 1: The illustration of limitations for appearance based
visual tracking. The first column shows the tracking results
where the Green, Blue, and Red bounding box represent
groundtruth, DiMP tracker, and our TS-RCN tracker, respec-
tively. The second column illustrates the HSV-color visualiza-
tion of the optical flow. In all three cases, the target optical
flow has a different pattern than that of its local background.
Row (a) shows dense similar objects (i.e. crabs) as distractors;
Row (b) shows confusing background textures as distractors
(i.e., the flying drone blends with background buildings); Row
(c) shows the target (i.e., soccer ball) has motion blurs. This
figure is best viewed in PDF format.
Although DiMP is trained to separate the background from
target, it may still fail when the background becomes more
confusing and challenging. As shown in Fig. 1 (a) and (b),
DiMP is not able to track the targets (blue bounding box) due
to same-class distractors (i.e., similar crabs) and confusing
background texture, respectively. Additionally, the tracking
can be disconnected if the current frame has motion blurs
on the target. For example, the soccer ball is blurred due to
high speed as shown in 1 (c). All the aforementioned issues
can happen in most deep learning based tracking approaches
arXiv:2005.06536v1 [cs.CV] 13 May 2020
下载后可阅读完整内容,剩余7页未读,立即下载
305 浏览量
2021-02-10 上传
151 浏览量
2021-02-10 上传
152 浏览量
2021-02-21 上传
196 浏览量

普通网友
- 粉丝: 1w+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 软件人员必读:六十本影响一生的经典著作
- SQL Server 2005:关键特性与数据库管理提升
- Scheme语言教程:编程语言中的‘皇后’
- 模式识别课程概述:贝叶斯方法与特征分析
- Java面试必备知识点与经典题目解析
- 富兰电子2008年软件工程师笔试题解析
- 电信网络实习日记:探索宽带数据部
- UG三维建模思路与技巧解析
- C++编程规范与最佳实践
- ASP.NET常用函数详解
- ASP.NET中JavaScript实例:无刷新Dropdownlist与表单验证
- JBPM入门与实战教程:工作流开发详解
- JAVA程序设计:从起源到工作原理
- C#网络编程入门:深入Remoting
- 理解与编写Makefile:Unix/Linux下的自动化编译工具
- 清华大学操作系统课程讲义-向勇主讲
