HALCON 3D机器视觉解决方案指南
需积分: 3 49 浏览量
更新于2024-08-02
收藏 4.48MB PDF 举报
"3D机器视觉"
在当今的工业自动化领域,3D机器视觉已经成为一种不可或缺的技术,它使得计算机能够获取并理解三维空间中的信息,从而进行精确的测量和分析。MVTec Software GmbH的Solution Guide II-F详细阐述了这一主题,主要关注如何利用HALCON库进行3D测量。
首先,3D机器视觉的基础知识是理解其核心概念,包括坐标转换和相机标定。坐标转换涉及将不同坐标系之间的点进行映射,这是实现3D定位和测量的关键步骤。相机标定是确定相机参数的过程,如内参矩阵和畸变系数,确保从图像到真实世界的坐标转换准确无误。
虚拟相机的建立是3D视觉的另一个重要方面。通过模拟不同的视角或设置,虚拟相机可以提供更全面的场景理解,这对于机器人导航、物体识别和精密测量尤其有用。HALCON提供了创建和操作虚拟相机的功能,允许用户在无需物理调整相机的情况下优化视场和成像效果。
在Solution Guide中,3D测量方法被详细讨论,包括但不限于点云处理、深度图像分析和几何形状识别。点云处理涉及到将3D数据集转化为可用于后续分析的形式,例如通过滤波、分割和特征提取。深度图像分析则利用单个或多个相机获取的深度信息来计算物体的三维位置。几何形状识别则允许系统识别和测量特定形状,如圆、边缘或平面,这对于质量控制和尺寸测量非常关键。
HALCON提供的示例程序可以在%HALCONROOT%\examples\solution_guide\3d_machine_vision子目录下找到,这些示例为实际应用提供了宝贵的参考。此外,该指南还涵盖了3D变换和姿态的概念,以及相机模型的描述,帮助用户深入理解3D视觉的工作原理。
最后,值得注意的是,此Solution Guide的所有内容受到版权保护,未经出版商许可,不得复制、存储或传播。随着HALCON版本的更新,如7.0.1版,解决方案指南也进行了相应的修订和完善,确保与最新技术保持同步。
3D机器视觉技术通过HALCON库提供了一套全面的工具,用于实现复杂的3D测量任务,涵盖从基础理论到实际应用的各个方面,对于提升工业自动化水平和产品质量具有重大意义。

F-12 2 Basics
also be written as homogeneous transformation matrices:
H =
R
y
(β) · R
z
(γ) t
0 0 0 1
=
1 0 0
0 1 1
0 0 1
t
0 0 0 1
·
R
y
(β)
0
0
0
0 0 0 1
·
R
z
(γ)
0
0
0
0 0 0 1
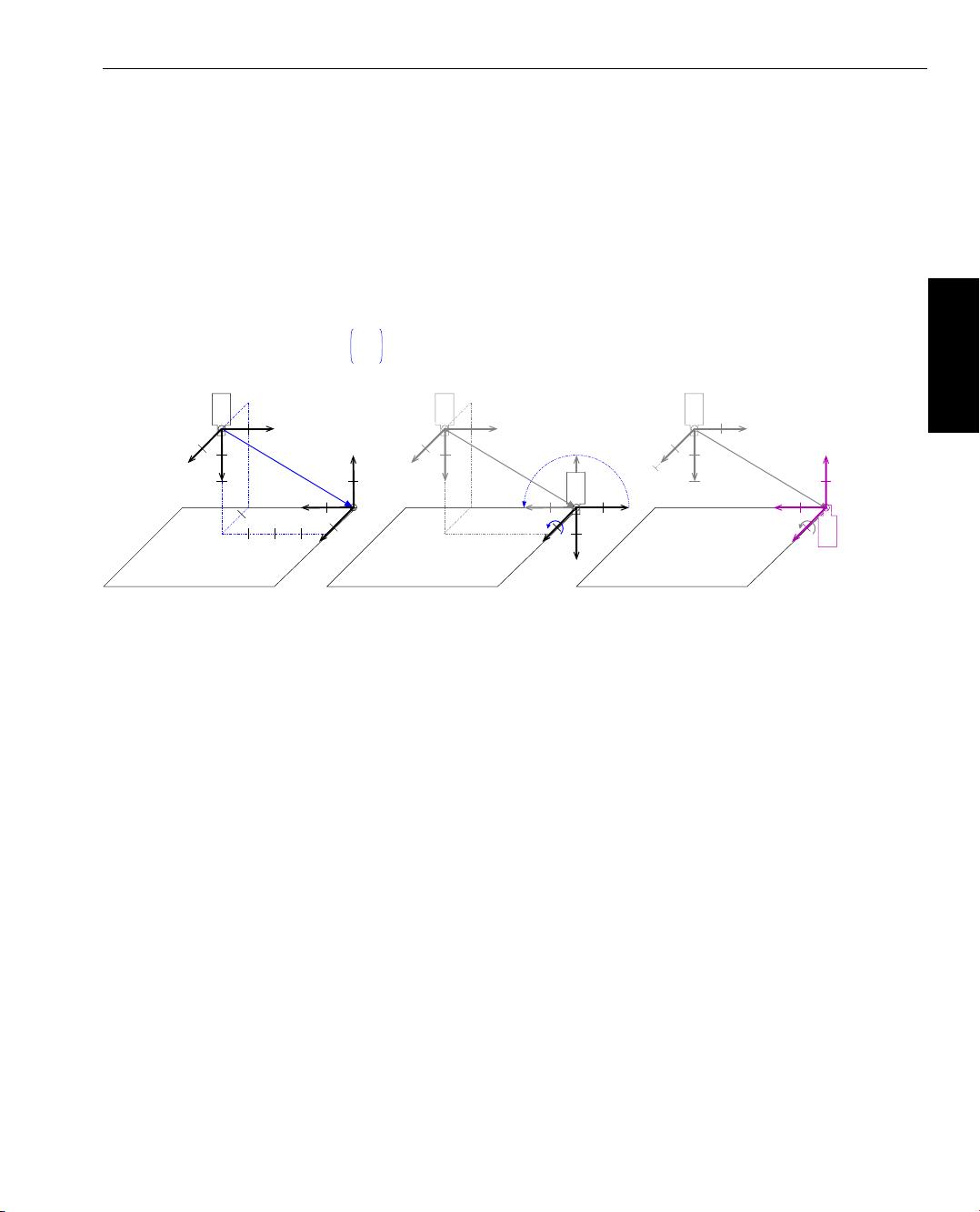
Reading this chain from right to left, you can follow the transformation of the point in figure 9: First, it
is rotated around the z-axis, then around the (“old”) y-axis, and finally it is translated.
Rigid Transformation of Coordinate Systems
Rigid transformations of coordinate systems work along the same lines as described for a separate trans-
lation and rotation. This means that the homogeneous transformation matrix
c
1
H
c
5
describes the trans-
formation of the coordinate system c
1
into the coordinate system c
5
. At the same time, it describes the
position and orientation of coordinate system c
5
relative to coordinate system c
1
: Its column vectors
contain the coordinates of the axis vectors and the origin.
c
1
H
c
5
=
x
c
1
c
5
y
c
1
c
5
z
c
1
c
5
o
c
1
c
5
0 0 0 1
(16)
As already noted for rotations, chains of rigid transformations of coordinate systems are typically read
from left to right. Thus, the chain above can be read as first translating the coordinate system, then
rotating it around its “new” y-axis, and finally rotating it around its “newest” z-axis.
Coordinate Transformations
As described for the separate translation and the rotation, to transform point coordinates from a rigidly
transformed coordinate system c
5
into the original coordinate system c
1
, you apply the same transfor-
mation to the points that was applied to the coordinate system c
5
, i.e., you multiply the point coordinates
with the homogeneous transformation matrix:
p
c
1
5
1
=
c
1
H
c
5
·
p
c
5
5
1
(17)
Typically, you leave out the homogeneous vectors if there is no danger of confusion and simply write:
p
c
1
5
=
c
1
H
c
5
·p
c
5
5
(18)
Summary
• Rigid transformations consist of a rotation and a translation. They are described very elegantly by
homogeneous transformation matrices, which contain both the rotation matrix and the translation
vector.
• Points are transformed by multiplying their coordinate vector with the homogeneous transforma-
tion matrix.



剩余145页未读,继续阅读
2025-03-06 上传
2025-03-06 上传
2025-03-06 上传
2025-03-06 上传

yynxuenuo
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Web远程教学系统需求分析指南
- 禅道6.2版本发布,优化测试流程,提高安全性
- Netty传输层API中文文档及资源包免费下载
- 超凡搜索:引领搜索领域的创新神器
- JavaWeb租房系统实现与代码参考指南
- 老冀文章编辑工具v1.8:文章编辑的自动化解决方案
- MovieLens 1m数据集深度解析:数据库设计与电影属性
- TypeScript实现tca-flip-coins模拟硬币翻转算法
- Directshow实现多路视频采集与传输技术
- 百度editor实现无限制附件上传功能
- C语言二级上机模拟题与VC6.0完整版
- A*算法解决八数码问题:AI领域的经典案例
- Android版SeetaFace JNI程序实现人脸检测与对齐
- 热交换器效率提升技术手册
- WinCE平台CPU占用率精确测试工具介绍
- JavaScript实现的压缩包子算法解读
