北斗/GPS双模射频接收模组设计与实现
155 浏览量
更新于2024-09-02
3
收藏 414KB PDF 举报
"本文介绍了北斗/GPS双模射频接收模组的设计与实现,该模组基于MAX2769射频芯片,具有高性能和稳定性,适用于商用卫星导航双模兼容接收机。文章深入探讨了关键的技术指标,如灵敏度、动态范围,并详细阐述了系统增益和动态范围的设计考量。此外,模组设计的灵活性使得它可以适应多种双模射频接收应用。"
在当前的卫星导航市场中,北斗系统与GPS的双模兼容已成为一个重要的发展方向,以满足民用市场的多样化需求。为了克服北斗系统在大众应用中的局限性,本文提出了一种基于两片MAX2769射频芯片的双模射频接收模组设计方案。MAX2769芯片因其优良的性能和相对较低的成本,成为实现双模兼容的理想选择。
文章首先强调了设计的关键技术指标,其中灵敏度和动态范围是决定接收机性能的重要因素。在复杂电磁环境下,高灵敏度确保了接收机能够捕捉到微弱的卫星信号,而大的动态范围则保证了在不同信号强度下接收机的稳定工作。设计中,作者分析了采用两级低噪声放大器(LNA)结构对整机噪声系数的影响,以及如何平衡系统增益与动态范围,以满足卫星导航接口控制文件的标准。
针对接收天线口信号强度的动态变化,文章讨论了三阶截点(IP3)和无杂散动态范围(SFDR)的概念,这些都是衡量接收机非线性特性和抑制杂散信号能力的关键参数。在设计接收模组的ADC部分时,需要确保链路具有低噪声系数和高三阶截点,以提供最佳的信噪比。
接下来,文章详细描述了射频模组的具体设计过程,包括射频电路的布局、PCB设计以及如何通过SPI总线配置芯片寄存器以实现不同卫星系统的兼容性。这种设计方法不仅适用于北斗/GPS双模,还可以灵活扩展到其他卫星导航系统,如GLONASS和Galileo。
本文提供了一种有效的双模射频接收模组设计方案,其性能优越、工作稳定,对于推动北斗系统在民用领域的广泛应用具有重要意义。同时,这种方法也为未来多模卫星导航接收机的研发提供了有价值的参考和实践基础。
北斗北斗/GPS双模射频接收模组的设计与实现双模射频接收模组的设计与实现
顺应双模或多模卫星导航接收机在民用市场中的发展趋势和需求,结合卫星导航接收机涉及的几个关键技术指
标和射频电路设计的基本理论,采用两片MAX2769射频芯片,设计了一款北斗/GPS双模兼容的射频接收模组。
实测结果表明,设计的模组性能优越,工作稳定,可以有效应用于商用卫星导航双模兼容接收机的研究中。
当前,北斗导航系统在大众层级中的普及应用有一定难度,相对于GPS的市场占有率,走北斗/GPS双模兼容之路不失为一种
策略。为此本文提出了北斗/GPS双模兼容射频接收模组的设计方案,并详述了具体的设计经验,方案可以满足用户对高定位
精度的需求[1-2]。
本文采用双MAX2769芯片的设计方案,芯片的工作性能比普通国产多模RFIC好,成本也远小于国产的相关射频接收模组。另
外本文阐述的虽是北斗/GPS双模射频接收模组设计,但只需通过SPI总线进行相关寄存器配置,即可实现GPS_L1、
GLONASS_L1、Galileo_E1、BDII_B1任意两两组合的双模射频接收模组的应用,这也正是本文的实用创新之处。
1 关键技术指标分析关键技术指标分析
在密集而复杂的电磁环境中,为实现接收机的高灵敏度和大动态范围,射频接收模组的设计中必须认真考虑灵敏度和动态范围
问题[3-4]。
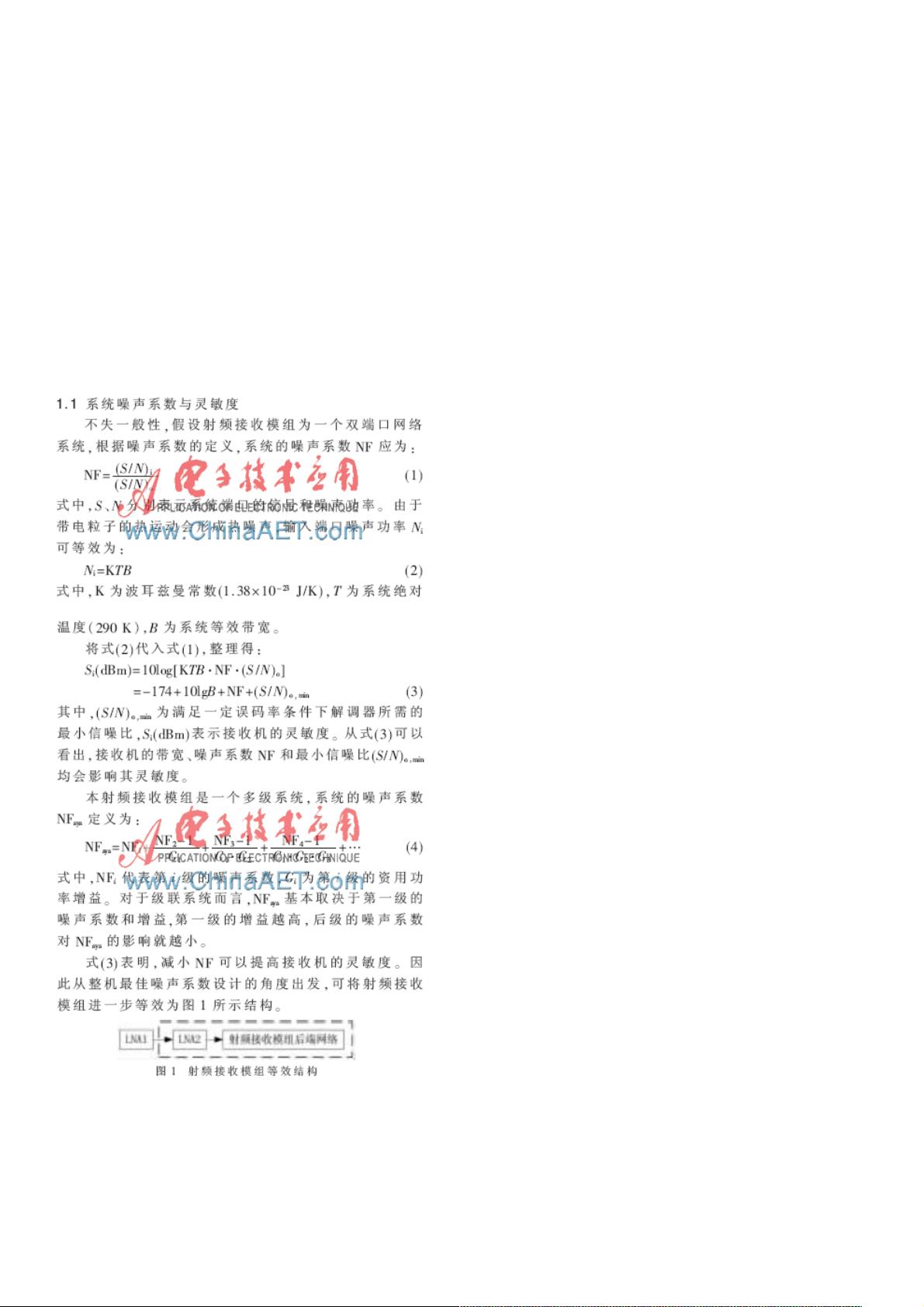
分析式(4)可知,在满足设计要求的条件下,第一级若采用两级低噪声放大器(LNA)结构,则整机噪声系数会提高很多。
1.2 系统增益与动态范围系统增益与动态范围
卫星导航接口控制文件规定:卫星发射的导航信号到达接收机天线输入口的最小保证电平:GPS_L1为-130 dBm,BDII_B1
为-133 dBm[5]。实际应用中,天线口的信号强度还与卫星的高度、仰角以及接收天线的接收面积和接收机所处的工作环境有
关,因此接收天线口所接收到的信号强度是一个动态的变化范围。另外,由于接收机射频模组的非线性特性,各级输出会存在
大量的杂散分量,这些杂散分量若是落入工作带宽内,将会影响信号的信噪比。因此,业内定义三阶截点来表征这种非线性特
性,同时还定义了无杂散动态范围(SFDR)用于比较不同接收机的动态特性[6],SFDR的表达式为:
下载后可阅读完整内容,剩余3页未读,立即下载
2018-05-12 上传
点击了解资源详情
点击了解资源详情
2021-01-19 上传
点击了解资源详情
2020-05-14 上传

weixin_38610682
- 粉丝: 6
- 资源: 878
 我的内容管理
展开
我的内容管理
展开







最新资源
- reflections-maven:反射 Maven 插件
- springboot025基于SpringBoot网上超市的设计与实现_zip.zip
- 最新版windows apache-tomcat-10.0.6-windows-x64.zip
- CC1101EM_868_915MHz_SCHEMATIC_3_0_0.rar_单片机开发_WINDOWS__单片机开发_WINDOWS_
- Python库 | jeffs_ds-0.1.0-py2.py3-none-any.whl
- test_example_regularayg_forcol_usrp_
- 直接插入排序算法:C语言实现直接插入排序算法
- MarketTechnicals.jl:Julia金融时间序列的技术分析
- react-native-visa-checkout
- hacker-stories:React之路
- SPWM_SPWM仿真_
- NtTrace:适用于 Windows“本机”API 的类似 strace 的程序
- c# 调用百度地图API 代码示例
- story_classifier:用于与 IBM Watson 的自然语言分类器交互的 Django Web 应用程序。 旨在简化训练数据输入以及测试分类器对查询的响应
- 基于Springboot的大学生就业招聘系统(源代码+论文+说明文档+PPT)-计算机专业精品毕业设计和课程设计
- simpleLayer:一个简单的注释弹出层
