BECKHOFF TwinCAT:基于PC的自动化控制核心原理与功能概览
BECKHOFF的TwinCAT是一款创新的基于PC的自动化解决方案,其核心原理是将传统的工业控制技术与现代计算机技术相结合,提供高效、灵活且易于集成的控制系统。TwinCAT的设计旨在利用PC平台的优势,如标准硬件、高性能和主流操作系统(Windows),同时保持实时性和可靠性,满足工业自动化的需求。
1. TwinCAT的工作原理:
- TwinCAT起源于控制技术的演变,从机械控制向电子控制,再到利用PC作为控制器,包括从槽位/CPU的独立控制到并行连接和现场总线通信。它实现了硬件到软件的转变,使得程序可以直接访问设备,提升控制效率。
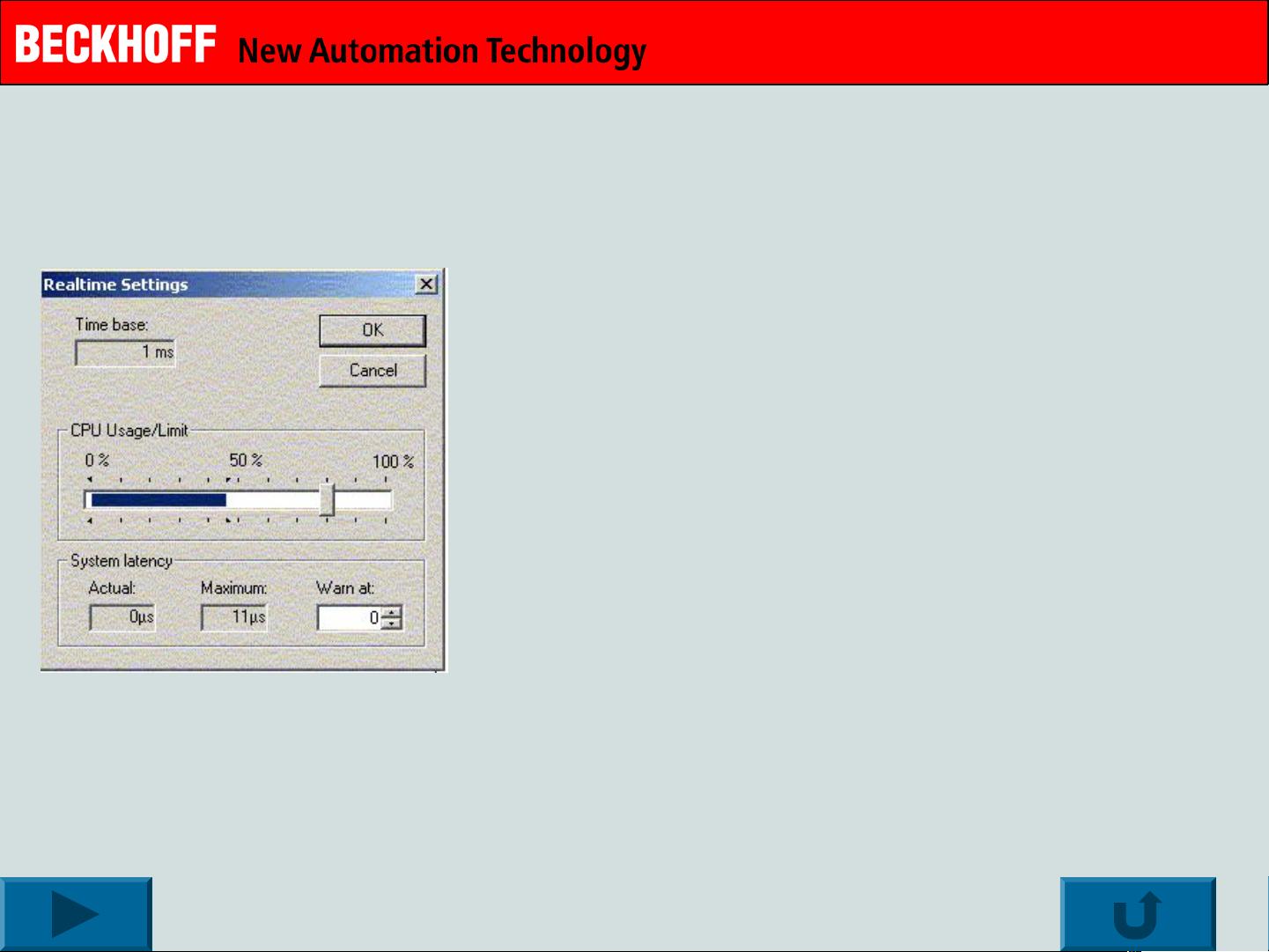
- TwinCAT的核心是其实时内核,它基于PC但提供了硬实时功能,能够在50微秒甚至更短的时间内完成一个循环,保证了系统的响应速度。通过强制优先级排序和专利的Windows可调节实时率,TwinCAT确保了在复杂应用中的快速响应。
- 控制系统采用分时多任务原理,能够同时处理多个任务,包括顺序控制(软PLC)、运动控制和通讯(如ADS协议),适应了现代工业对多功能性和灵活性的需求。
2. TwinCAT的特点:
- BECKHOFF开发的TwinCAT具有高度兼容性,无需额外的专用硬件,能够无缝融入Windows环境,充分利用FPU能力,并通过OCX和DLL提供丰富的用户界面交互。
- 作为基于PC的自动化工具,TwinCAT的体系结构覆盖了关键组件,如I/O接口管理、控制逻辑、运动控制以及连通性,支持实时数据采集和远程访问。
- TwinCAT支持嵌入式操作系统,使其能在不同的硬件平台上运行,如嵌入式WindowsNT/XP和CE.NET,增强了其部署的灵活性。
3. TwinCAT的应用范围:
- TwinCAT的功能强大,不仅限于传统PLC的功能,还扩展到了运动控制和高级通讯,适用于各种自动化场景,包括工程设计、实时数据处理和远程监控等。
- 它的HMI工具让用户可以直观地进行编程和配置,简化了工程师的工作流程。同时,TwinCAT与工业网络的兼容性使其能轻松集成到办公网络中,实现高效的自动化生产流程。
总结来说,BECKHOFF的TwinCAT以其先进的技术特点,如PC平台整合、实时性能、开放的通信接口和全面的功能,推动了基于PC的自动化向着更高效、灵活和可扩展的方向发展。无论是从控制策略到实际操作,TwinCAT都是工业4.0时代不可或缺的关键组件。
5
TwinCAT 的原理
BECKHOFF 技术特点
•
由 Beckhoff 开发
•
无需 PC 外的其它硬件
•
循环时间可短至 50 微秒
•
强制优先排序
•
反应时间 < 15 微秒 (PIII)
•
对 Windows 可调节实时率 ( 专利权 )
•
如果反应时间过长则发信息
TwinCAT 实时核的原理
剩余23页未读,继续阅读
2018-01-30 上传
2020-09-24 上传
2015-01-27 上传
2019-10-26 上传
108 浏览量
2022-05-12 上传

oja911
- 粉丝: 3
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- IP V6.0 学习资料(十六)系统学习IPV6的利器
- Wap入门文档(doc文件)
- IP V6.0 学习资料(十四)系统学习IPV6的利器
- 嵌入式linux入门资料
- NEC Aspila Topaz 编程手册
- IP V6.0 学习资料(十三)系统学习IPV6的利器
- IP V6.0 学习资料(十二)系统学习IPV6的利器
- VS2008快捷键大全
- IP V6.0 学习资料(十)系统学习IPV6的利器
- 俄罗斯方块Java程序
- IP V6.0 学习资料(九)系统学习IPV6的利器
- IP V6.0 学习资料(七)系统学习IPV6的利器
- IP V6.0 学习资料(六)系统学习IPV6的利器
- IP V6.0 学习资料(五)系统学习IPV6的利器
- 《工业设计 创意技法》
- IP V6.0 学习资料(三)系统学习IPV6的利器
