E-UTRA间切换与移动性详解:协议36.331 5.4节
需积分: 9 104 浏览量
更新于2024-09-12
收藏 1.2MB DOCX 举报
本资源主要讨论了3GPP协议36.331第五章第四节——"Inter-RAT Mobility",即异系统间移动性管理。这一部分详细介绍了在不同无线接入技术(RATs)之间的移动性处理,特别是E-UTRA与其他RAT(如GERAN、UTRAN或CDMA2000)之间的切换和移动。
首先,章节5.4.1概述了连接模式下的移动性原则,这些原则已经在5.3.1.3和5.3.1.2中进行了概括。对于从E-UTRA到其他RAT的移动,UE在RRC_CONNECTED状态下,支持切换、小区变更命令以及可能的增强型电路交换(CS)回落至CDMA2000 1xRTT,但具体的切换时间由eNodeB决定,目标小区由目标RAT确定。
5.4.2.1至5.4.2.5详细描述了从非E-UTRA(如UTRAN)切换到E-UTRA的过程。切换通常在另一个RAT上建立SRB和DRB时进行,并且只有在UTRAN完整性保护激活后才启动。RRCConnectionReconfiguration消息是关键步骤,UE在接收并遵循该消息配置后开始切换,如果配置无法满足则触发相应处理。
5.4.3.1部分则聚焦于从E-UTRA到其他RAT的移动,如切换到GERAN或UTRAN等。此流程涉及MobilityFromEUTRACommand消息的发送,作为测量报告响应或CS回落指示的回应。该流程在AS-Security激活时启动,并且必须包括SRB2和至少一个DRB的配置。
这部分协议内容深入探讨了在不同RAT间的无缝切换和移动性管理,确保了用户在切换过程中能够保持服务连续性和安全性,对网络运营商和设备制造商理解跨RAT操作的实施机制具有重要意义。
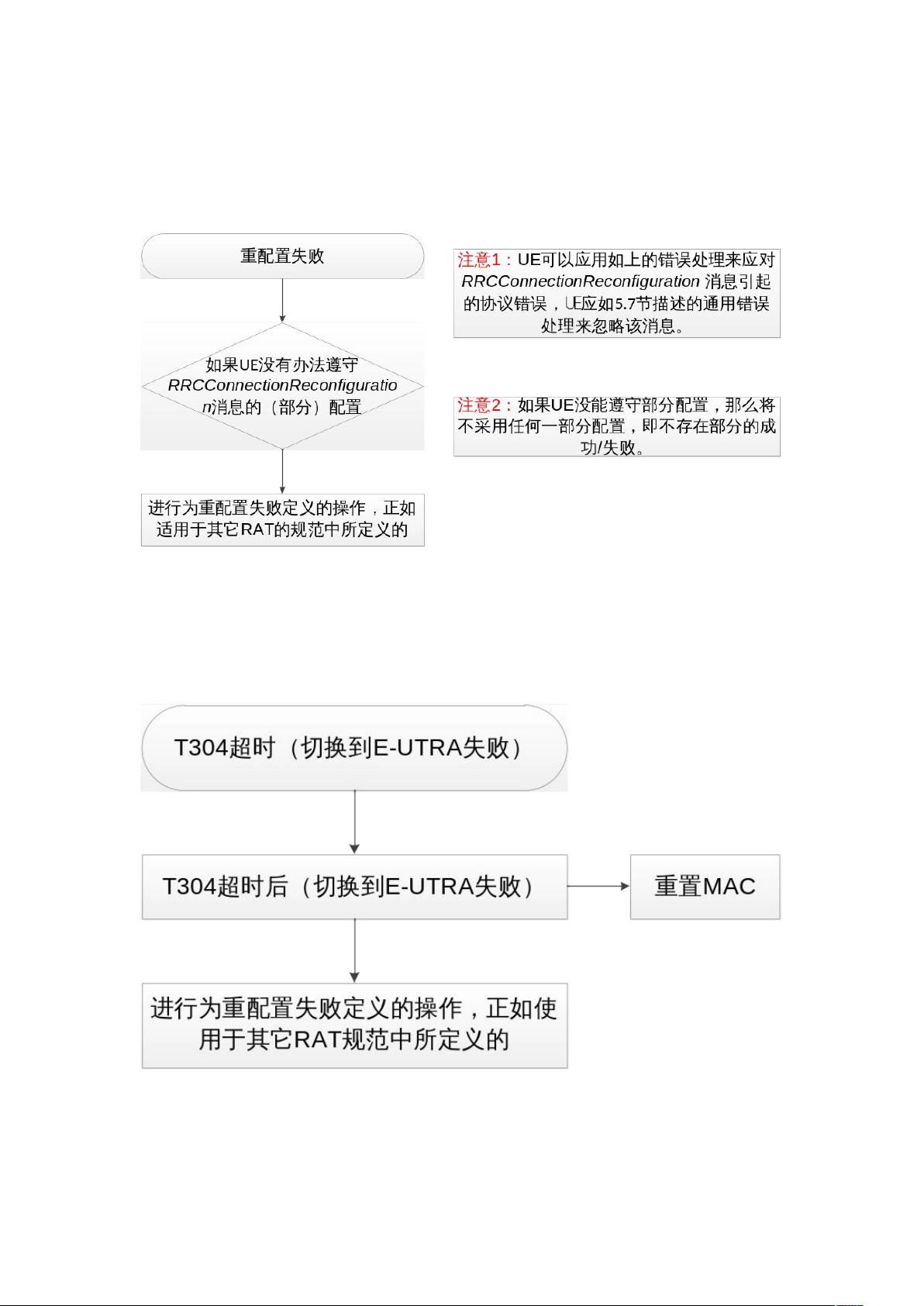
5.4.2.4 重配置失败
UE 应:
5.4.2.5 T304 超时(到 E-UTRA 的切换失败)
UE 应:
剩余12页未读,继续阅读
109 浏览量
2019-01-08 上传
2008-11-30 上传
2019-03-14 上传
2014-06-10 上传
2018-11-08 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

expsive
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- RPSL:机器人感知规范语言(RPSL)
- 学生成绩管理系统(java实现).zip
- java11_64_bin.zip jdk11免费下载
- My-FreeCodeCamp-Code:我来自训练营的代码
- eulerian_video_magnification:实现欧拉视频放大并用于心率检测等
- pet-projects.dev-frontend:用于https:dev-pet-projects.github.io的Nuxt.js Buefy前端
- cpp代码-162.4.4.2
- matlab由频域变时域的代码-speaker-recognition:说话人识别
- 【课设警告】每个Java老师都喜欢的学生成绩管理系统.zip
- Amzl_Proto
- JSG202227 2022年江苏省职业院校技能大赛(高职) 电子产品芯片级检测维修与数据恢复 赛项规程.zip
- 9cc:小型C编译器
- yamame1212.github.io
- GAN_model:使用GAN生成3D网格模型
- 差异:用于生成字符串差异的简单gem
- Xshell7个人免费版
