
单片机与单片机与DSP中的基于中的基于DSP的车载的车载GPS/DR组合导航系统硬件组合导航系统硬件
设计设计
摘要:针对低成本组合导航技术发展的需要,结合主要传感器特点,本文介绍了以浮点DSP TMS320VC33为组
合导航算法实现的核心处理器,利用TL16C554进行通信口扩展的GPS/DR组合导航系统的设计方案,给出了系
统硬件的设计方法。所设计的系统具有体积小、成本低、实时性好、可靠性高、扩展性好等特点,具有广泛的
应用价值。 关 键 词:组合导航系统 GPS/DR DSP FPGA TL16C554 1 引言 目前,差分GPS水平定
位精度已经达到3~5m,完全满足车辆定位精度的要求。但是,由于在城市高建筑群中或穿过立交桥时,常常会
出现GPS信号遮挡问题,导致
摘要:摘要:针对低成本组合导航技术发展的需要,结合主要传感器特点,本文介绍了以浮点DSP TMS320VC33为组合导航算法实
现的核心处理器,利用TL16C554进行通信口扩展的GPS/DR组合导航系统的设计方案,给出了系统硬件的设计方法。所设计
的系统具有体积小、成本低、实时性好、可靠性高、扩展性好等特点,具有广泛的应用价值。
关关 键键 词词:组合导航系统 GPS/DR DSP FPGA TL16C554
1 引言引言
目前,差分GPS水平定位精度已经达到3~5m,完全满足车辆定位精度的要求。但是,由于在城市高建筑群中或穿过立交桥
时,常常会出现GPS信号遮挡问题,导致GPS不能正常定位。航位推算(DR)是常用的车辆定位技术,但方向传感器随时间积
累误差较大,不能单独、长时间地使用。采用组合导航系统能够利用GPS系统提供的位置和速度信息对DR系统的误差进行实
时的校正和补偿;当GPS信号失锁时,又可通过DR系统完成航位推算,提高了组合导航系统的可靠性。
组合导航系统除了要完成大量运算处理工作外,还要实现惯性测量单元IMU(陀螺仪和加速度计)和GPS等传感器的数据采
集、与外部系统的通信、时序逻辑控制和人机接口等功能。在这种情况下,如果仅用一片DSP芯片,则系统的实时性能较
差,因此多数组合系统都采用两个或多个DSP或是由一个或几个通用的微处理器MPU加上一个DSP构成主从式多处理器系统
的方案。而目前利用DSP与FPGA结合的方案来处理高速的数字信号越来越被广泛采用。
2 GPS/DR组合导航系统组成组合导航系统组成
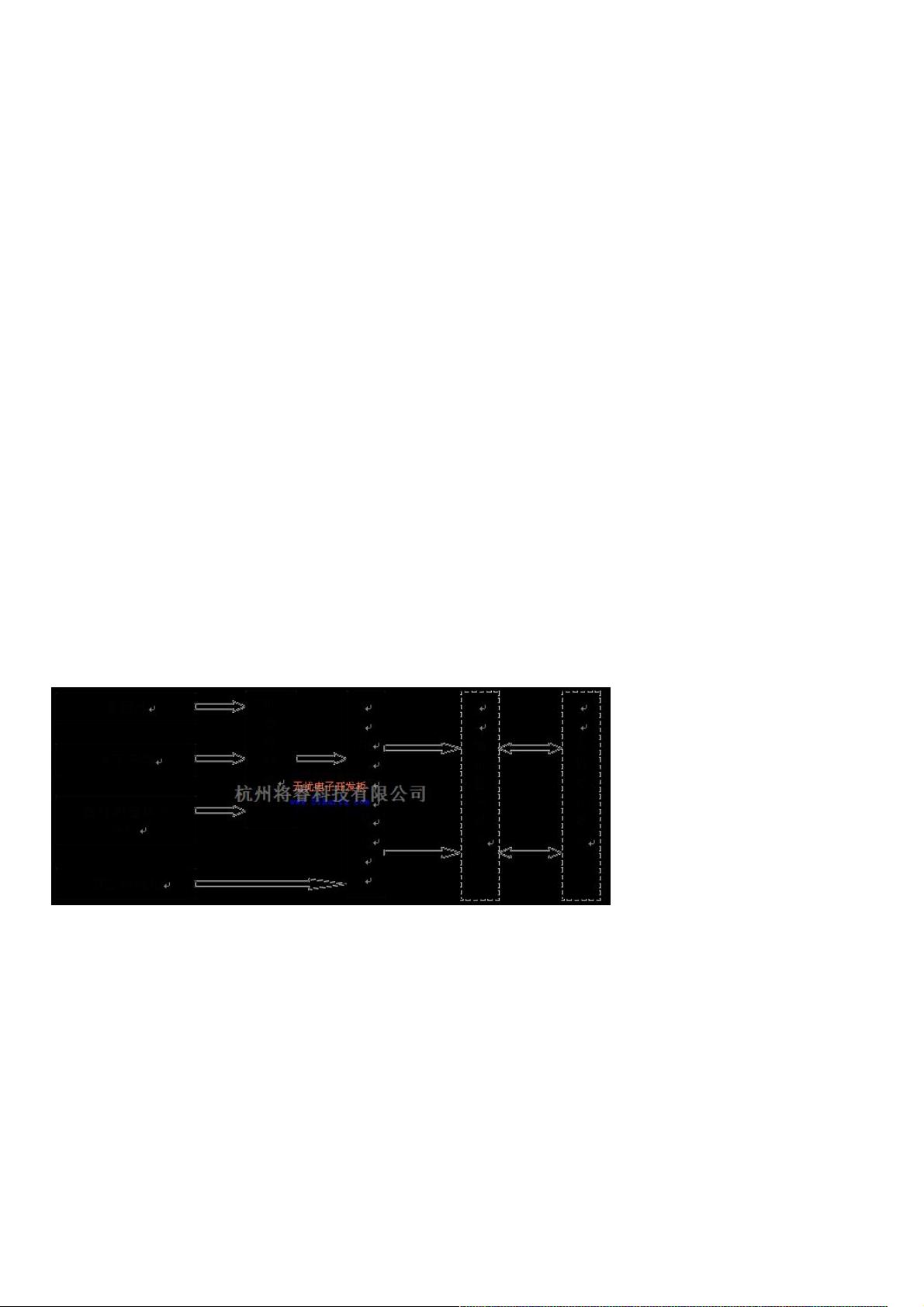
该GPS/DR组合系统具有接收和处理里程计信息、电子罗盘信息、惯性测量单元IMU以及GPS的信息的功能,其系统组成主
框图如图1所示。
图1 组合导航系统的组成框图
GPS提供的绝对位置信息可以为DR提供推算定位的初始值并进行误差校正;另一方面,DR的推算结果可以用于补偿部分
GPS定位中的随机误差,从而平滑定位轨迹。所以,利用适当的方法将两种系统组合起来,充分利用其定位信息的互补性,
就能够获得比单独使用任何一种方法时都要高的定位精度和可靠性
[1]
。
2 中心处理单元的组成中心处理单元的组成
目前导航系统已经发展成为采用多传感器数据融合的组合导航系统,导航计算机在完成复杂计算的同时,还要进行大量的
数据通信,因此必须具有丰富的通信接口,完成传感器数据的采集、传输任务。这就需要中心处理单元能够在进行与外部通信
的同时,还要保证计算精度和运算速度。
通过对系统进行功能分析,导航计算机需要完成数据采集、数据处理和数据输出功能。数据输入部分主要完成各种传感器
输出数据的采集;数据处理部分主要完成数据滤波、微型惯性测量元件的误差补偿和初始对准、卡尔曼滤波以及进行导航参数
解算等等;数据输出部分主要负责导航参数输出,应用于定位导航或者下一步需要的输入。由于采用多种传感器进行信息融
合,需要较多的外围通信接口,同时,外部传感器数据输出通信主要通过符合RS-232标准的异步串行通信口进行,如果和中
央处理器直接相连,大量的中断响应必将影响到CPU的处理速度,目前各种MCU、MPU可以提供的串口资源也是有限的。传
统的设计很多都是采用PC104作为系统的中心处理器,PC104体积大,价格高,不利于系统的小型化、低功耗和低成本的实
现。因此,本设计考虑采用DSP+FPGA+TL16C554的方案进行设计,其中 DSP完成主要的导航参数计算,利用TL16C554进
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38538585
- 粉丝: 3
- 资源: 956
 我的内容管理
展开
我的内容管理
展开







最新资源
- Google Test 1.8.x版本压缩包快速下载指南
- Java实现二叉搜索树的插入与查找功能
- Python库丰富性与数据可视化工具Matplotlib
- MATLAB通信仿真设计源代码与应用解析
- 响应式环保设备网站模板源码下载
- 微信小程序答疑平台完整设计源码案例
- 全元素DFT计算所需赝势UPF文件集合
- Object-C实现的Flutter组件开发详解
- 响应式环境设备网站模板下载 - 恒温恒湿机营销平台
- MATLAB绘图示例与知识点深入探讨
- DzzOffice平台新插件:excalidraw白板功能介绍与使用指南
- Java基础实训教程:电子商城项目开发与实践
- 物业集团管理系统数据库设计项目完整复刻包
- 三五族半导体能带参数计算器:精准模拟与应用
- 毕业论文:基于SSM框架的毕业生跟踪调查反馈系统设计与实现
- 国产化数据库适配:人大金仓与达梦实践教程
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


