光场抠图:空角一致性模型与优化
版权申诉
67 浏览量
更新于2024-06-27
收藏 1.82MB DOCX 举报
"基于空角一致性的光场抠图技术是用于从光场数据中提取前景与背景信息的一种方法,它利用了四维光场数据的空间-角度耦合关系,旨在提高抠图的质量和效率。通过建立满足空间-角度一致性的光场抠图传播模型,可以快速得到具有高一致性的光场Alpha图。此外,该技术还引入了基于极平面图(EPI)的定量评价指标,用于评估光场Alpha图的空间-角度一致性。"
在光场抠图领域,传统的二维图像抠图方法可能无法充分利用光场数据的多视图信息,从而导致结果的不准确或不连续。基于空角一致性的方法则弥补了这一不足。具体来说,它首先对光场数据进行稀疏表示,揭示了不同子孔径图像之间的内在联系。这种稀疏表达有助于构建一个光场抠图传播模型,该模型可以将中心子孔径图像的Alpha闭合解(即前景与背景的分割信息)高效地传播到其他子孔径图像中。
光场抠图传播模型的建立是该技术的核心。通过这个模型,可以在保持空间-角度一致性的前提下,避免逐个子孔径图像的重复计算,从而提高计算速度。这意味着,即使在处理大量子孔径图像时,也能快速得到整个光场的Alpha图,这对于实时或大数据量的光场处理具有重要意义。
为了进一步验证算法的性能,通常会使用模拟数据集和实际光场数据进行数值实验。实验结果表明,与传统的逐子孔径图像抠图方法相比,基于空角一致性的算法在减少冗余计算的同时,能更快地生成具有更优空间-角度一致性的Alpha图,这提升了抠图的准确性和视觉质量。
此外,基于极平面图(EPI)的定量评价指标是评估光场Alpha图一致性的重要工具。EPI是光场数据的一种特殊表示,它可以直观地展示不同视点之间像素的关系。通过分析EPI中的模式和变化,可以量化Alpha图在空间-角度维度上的连续性和一致性,从而对抠图算法的性能进行客观评估。
基于空角一致性的光场抠图技术结合了光场数据的特性,通过有效的模型和评价方法,提高了光场图像处理的效率和质量,对于光场图像分析、合成以及目标提取等应用具有重要的理论和实践价值。
式中:Iuk,vk(x,y)Iuk,vkx,y 为视点(uk,vk)uk,vk 下的子孔径图像;Iu0,v0(x,y)Iu0,v0x,y 为
视点(u0,v0)u0,v0 下的子孔径图像;kk 为视点标号;Δuk=uk−u0;Δvk=vk−v0Δuk=uk-
u0;Δvk=vk-v0。
对于朗伯辐射无遮挡场景的 4D 光场数据,可以根据空角一致性,利用中心子孔径图像和
视差图进行稀疏化表达。对于 4D 光场数据 L(u,v,x,y)L(u,v,x,y),角度域变量 u
和
vu 和
v 的取值范围分别为 1−Nu1-Nu 和 1−Nv1-Nv,空间域变量 x
和
yx 和 y 的取值范围分别
为 1−Nx1-Nx 和 1−Ny1-Ny,场景完整的 4D 光场信息需要 Nu×NvNu×Nv 个
Nx×NyNx×Ny 大小的子孔径图像 Iu,v(x,y)Iu,vx,y 来进行记录。基于朗伯辐射场景和无遮
挡的假设,如果已知光场的中心子孔径图像 Iu0,v0(x,y)Iu0,v0x,y 和视差图
Gdisp(x,y)Gdispx,y,就可以利用上述的耦合关系将中心子孔径图像进行传播,得到所有视
点下的子孔径图像,这样 Iu0,v0(x,y)Iu0,v0x,y 和 Gdisp(x,y)Gdispx,y 两幅 Nx×NyNx×Ny
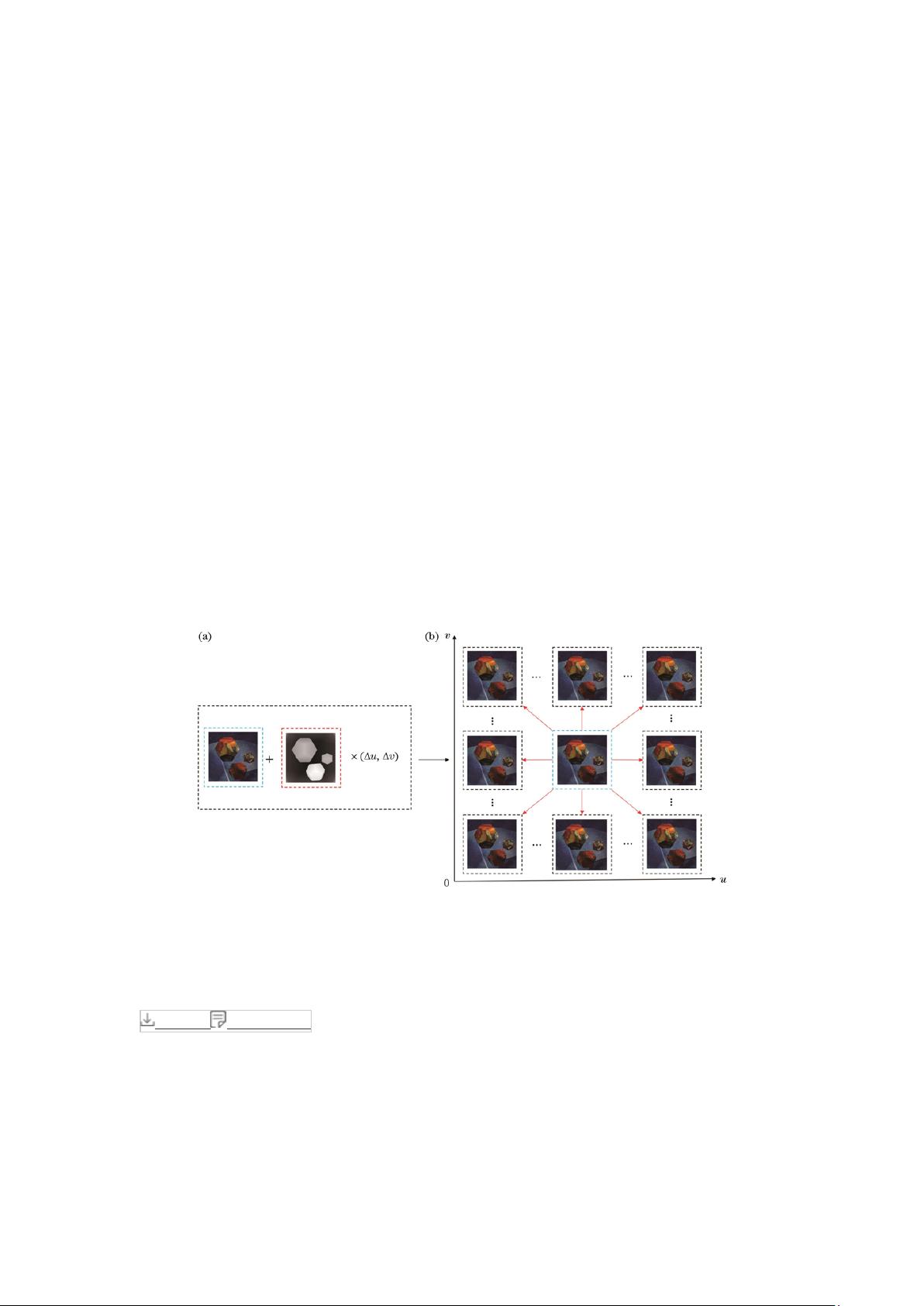
大小的图像就可以记录场景完整光场信息 L(u,v,x,y)L(u,v,x,y),如图 2 所示。稀疏化表达
的光场降低了数据量,可以减少后续的计算冗余,提高效率。同时,选用该光场可以避免
对逐子孔径图像分别进行计算,保持了光场数据的空角一致性。
图 2. 光场稀疏化表达。(a)中心子孔径图像和视差图;(b)子孔径图像
Fig. 2. Sparse representation of light field. (a) Central sub-aperture image and
disparity map; (b) sub-aperture images
下载图片 查看所有图片
2.2 光场抠图
光场的抠图是对光场前景的精确提取。在朗伯辐射无遮挡场景前提下,若前景的透明度不
随视点变化,即同一物点所对应像素的 alpha 值不随视点改变,则光场 alpha 图可以由中
心子孔径图像的 alpha 图 αu0,v0(x,y)αu0,v0x,y 与光场数据的视差图 Gdisp(x,y)Gdispx,y
剩余17页未读,继续阅读
点击了解资源详情
1357 浏览量
358 浏览量
2023-02-27 上传
2021-09-26 上传
2021-09-27 上传
2021-09-27 上传
133 浏览量
137 浏览量

罗伯特之技术屋
- 粉丝: 4558
 我的内容管理
展开
我的内容管理
展开







最新资源
- 武汉大学数字图像处理课程课件精要
- 搭建个性化知识付费平台——Laravel开发MeEdu教程
- SSD7练习7完整解答指南
- Android中文API合集第三版:开发者必备指南
- Python测试自动化实践:深入理解更多测试案例
- 中国风室内装饰网站模板设计发布
- Android情景模式中音量定时控制与铃声设置技巧
- 温度城市的TypeScript实践应用
- 新版高通QPST刷机工具下载支持高通CPU
- C++实现24点问题求解的源代码
- 核电厂水处理系统的自动化控制解决方案
- 自定义进度条组件AMProgressView用于统计与下载进度展示
- 中国古典红木家具网页模板免费下载
- CSS定位技术之Position-master解析
- 复选框状态持久化及其日期同步技术
- Winform版HTML编辑器:强大功能与广泛适用性
