RISC-V Debug规格V0.13.2:详解外部调试支持
需积分: 6 60 浏览量
更新于2024-07-16
1
收藏 799KB PDF 举报
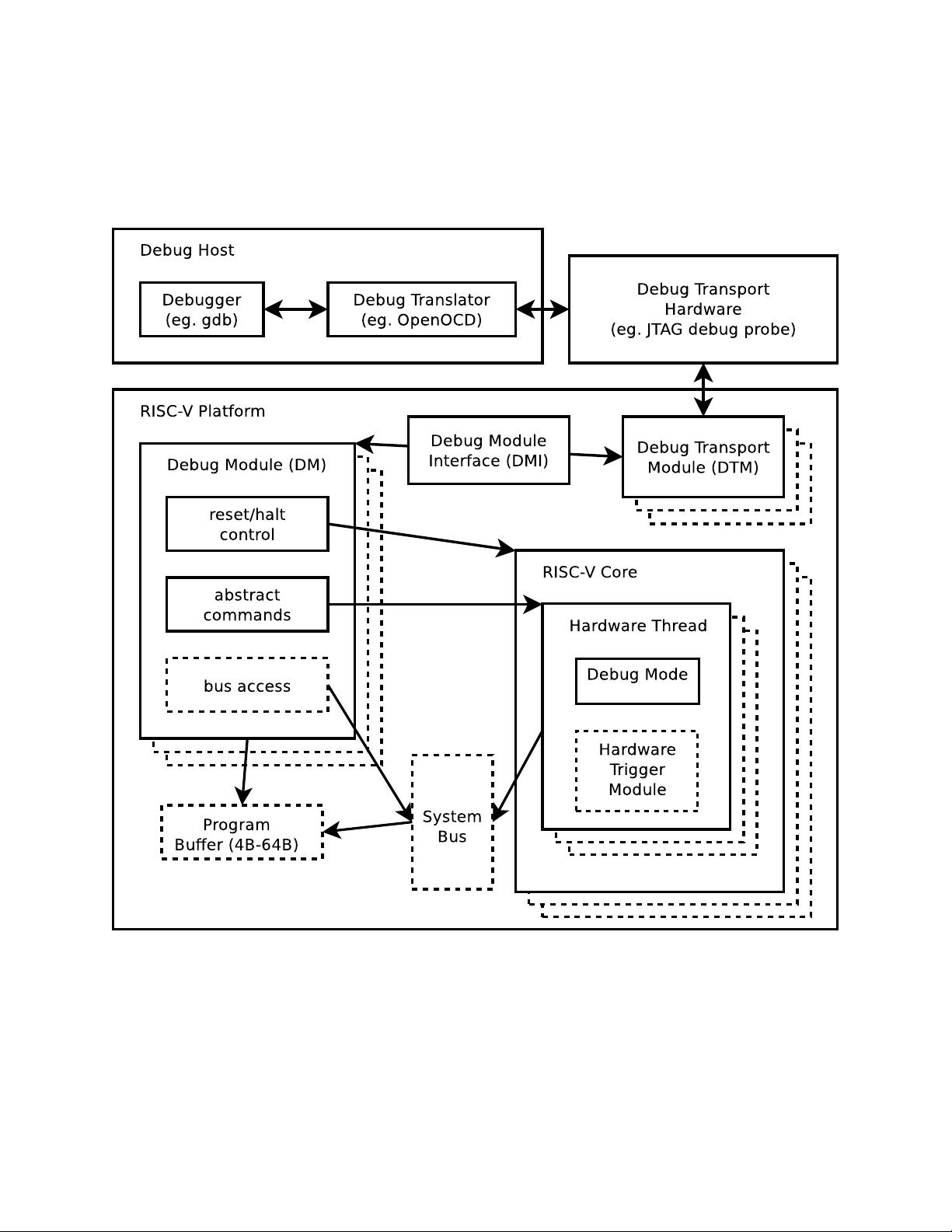
RISC-V External Debug Support Version 0.13.2 是一份详细描述RISC-V架构中外部调试功能的规格文档。RISC-V是开源的指令集架构(ISA),它允许硬件开发商设计定制的处理器,而这份规范主要关注如何在这些处理器上实现调试接口,以便软件开发者能有效地进行调试。
1. **术语解释**:
- **Context**: 这部分定义了调试上下文,包括程序执行状态的各个方面,如寄存器值、内存映射等,这对于理解和控制调试过程至关重要。
- **Versions**: 规格说明可能涉及到多个版本的更新,每个版本都可能引入新的调试特性或改进现有功能,确保兼容性和可扩展性。
2. **文档结构与格式**:
- 文档采用结构化的组织方式,便于读者快速找到所需信息,包括引言、术语、背景和技术细节。
- 注册定义格式明确,如"LongName(shortname,at0x123)",这种命名约定有助于调试工具理解和操作特定的调试寄存器。
3. **背景信息**:
- 该文档提供了关于RISC-V调试需求的背景,可能涉及先前的调试标准和挑战,以及RISC-V社区如何应对这些需求,以提供一种灵活且标准化的解决方案。
4. **贡献者名单**:
- 众多来自学术界和业界的专业人士共同参与了这份规格的编写和维护,反映了RISC-V社区的合作精神和对开源生态的重视。
5. **内容概览**:
- 内容涵盖了调试接口的介绍,包括基本概念、术语定义、调试环境的构建以及具体的技术实现细节。这包括但不限于调试协议、调试数据交换、中断管理以及支持的调试特性的描述。
RISC-V External Debug Support Version 0.13.2 是一个关键文档,它为RISC-V平台的开发者提供了一套标准来集成和使用外部调试工具,确保了跨平台的调试一致性,并推动了RISC-V生态系统的成熟和广泛应用。通过了解和遵循这份规格,软件开发者可以充分利用RISC-V的灵活性,同时确保代码的高效调试和优化。



214 浏览量
639 浏览量
362 浏览量
306 浏览量
757 浏览量

jiewoyimoxiao
- 粉丝: 3
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- 个人数字证书与CA认证.pdf
- Electronics Workbench(ewb)简明中文教程
- 单片机设计题目要求 温度计
- C语言嵌入式系统编程修炼之道.pdf
- Java swing学习课件
- JavaEye论坛热点_-_2008年11月
- C++标准程式库.pdf
- VC++2005入门经典(英文版).pdf
- 2009年计算机等级考试四级数据库工程师考试 课后答案
- 手工创建数据库,在命令提示符下的创建操作步骤.
- J2ME企业级开发-j2me
- 雅思听力807词汇表
- [教程] 权威揭密 笔记本硬件结构终极教程&_8226_(上、中、下)
- 编程相关日语词汇 基本的
- ITIL_V3的五大生命周期管理.pdf
- 2009年计算机等级考试四级数据库工程师考试重难点
