




ROS2性能评估与分析
需积分: 21 124 浏览量
更新于2024-09-03
收藏 390KB PDF 举报
"这篇会议论文‘Exploring the Performance of ROS2’主要探讨了ROS2的性能测试结果,展示了在实时分布式嵌入式系统中的表现。文章由Yuya Maruyama、Shinpei Kato和Takuya Azumi三位作者撰写,他们在自动驾驶、TOPPERS项目TECSWG等领域有相关研究背景。"
ROS2是Robot Operating System的最新版本,它是机器人开发领域广泛采用的开源中间件。该中间件的设计目标是满足实时性和分布式系统的需求,对于构建复杂的机器人应用至关重要。这篇论文发布于2016年10月,至今已被引用38次,阅读量达到了4,922次,显示出ROS2及其性能评估在业界的广泛关注。
论文中,作者们对ROS2的性能进行了深入探索,可能包括消息传递效率、计算负载、网络延迟等方面。ROS2的核心改进之一是增强了实时性,这在要求严格的机器人应用中非常重要,例如自动驾驶和自动化制造。此外,ROS2还引入了DDS(Data Distribution Service)作为其底层通信机制,以提高数据传输的可靠性和效率。
DDS是一种标准的中间件,它允许不同设备之间的高效、可靠和实时的数据交换。通过使用DDS,ROS2能够支持更大规模的系统集成,以及更复杂和异构的网络环境。论文可能分析了DDS如何影响ROS2的整体性能,并与其他中间件(如ROS1)进行了对比。
在实际应用中,ROS2的性能测试可能包括模拟和真实环境下的实验,测试了各种工作负载条件下的系统响应时间、并发处理能力以及资源占用情况。这些测试结果对于开发者来说非常有价值,因为他们可以据此选择最佳的硬件平台和优化软件设计,以确保机器人系统的高效运行。
总体而言,这篇论文提供了对ROS2性能的深入理解,有助于推动ROS2在机器人技术领域的进一步发展和应用。通过这些研究成果,开发者可以更好地评估和利用ROS2在实时性、可扩展性和可靠性方面的优势,从而在设计和实现下一代机器人系统时做出更明智的决策。
ďƐƚƌĂĐƚ^>ĂLJĞƌ
^
>ŝŶƵdžtŝŶĚŽǁƐDĂĐZdK^
ůŝĞŶƚ>ŝďƌĂƌLJ
>ŝŶƵdž
ůŝĞŶƚ>ŝďƌĂƌLJ
dWZK^hWZK^
ƉƉůŝĐĂƚŝŽŶ
EŽĚĞ
EŽĚĞ
EŽĚĞ
DĂƐƚĞƌ
ƉƉůŝĐĂƚŝŽŶ
EŽĚĞ EŽĚĞ
$SSOLFDWLRQ
/D\HU
0LGGOHZDUH
/D\HU
26
/D\HU
ZK^ϭ
EŽĚĞůĞƚ
W/
/ŶƚƌĂͲƉƌŽĐĞƐƐ
W/
ZK^Ϯ
Figure 1: ROS1/ROS2 architecture.
for DDS approach to ROS. We clarify the performance of the
data transport for ROS1 and ROS2 in various situations.
Performance means latency characteristics, throughput and
distributed capability. Focusing on the DDS capabilities, de-
pending on DDS vendors and configurations, we explore and
evaluate the potential and constraints from various aspects:
latencies, throughput, the number of threads, and memory
consumption. From experimental results, we arrange guide-
lines and what we can do to solve current constrains. To
the best of our knowledge, this is the first study to explore
ROS2 performance.
Organization: The remainder of this paper is organized
as follows. Section 2 provides background information and
describes the ROS and DDS system models. Section 3 vali-
dates experimental situations and evaluates the performance
of ROS1 and ROS2 with various configurations. Section 4
discusses related work. Finally, Section 5 concludes the pa-
per and offers suggestions for future work.
2. BACKGROUND
In this section, we provide background knowledge. First,
we describe the ROS2 system model compared to ROS1,
focusing on its communication system. We then review as-
pects of the ROS, such as the publish/subscribe model. Fi-
nally, we describe DDS, which is used as the communication
system for real-time systems in ROS2.
2.1 Robot Operating System (ROS)
Figure 1 briefly illustrates the system models of ROS1 and
ROS2. In the left side of Figure 1, ROS1’s implementation
includes the communication system, TCPROS/UDPROS.
This communication requires a master process (unique in
the distributed system) because of the implementation of
ROS1. In contrast, as shown in the right side of Figure
1, ROS2 builds upon DDS and contains a DDS abstraction
layer. Users do not need to be aware of the DDS APIs due to
this abstraction layer. This layer allows ROS2 to have high-
level configurations and optimizes the utilization of DDS. In
addition, due to use of DDS, ROS2 does not need a master
process. This is a import point in terms of fault tolerance.
ROS applications consist of independent computing pro-
cesses called nodes, which promote fault isolation, faster de-
velopment, modularity, and code reusability. Communica-
tion among nodes is based on a publish/subscribe model.
In this model, nodes communicate by passing messages via
a topic.Amessage has a simple data structure (much like
C structs) defined by .msg files. Nodes identify the content
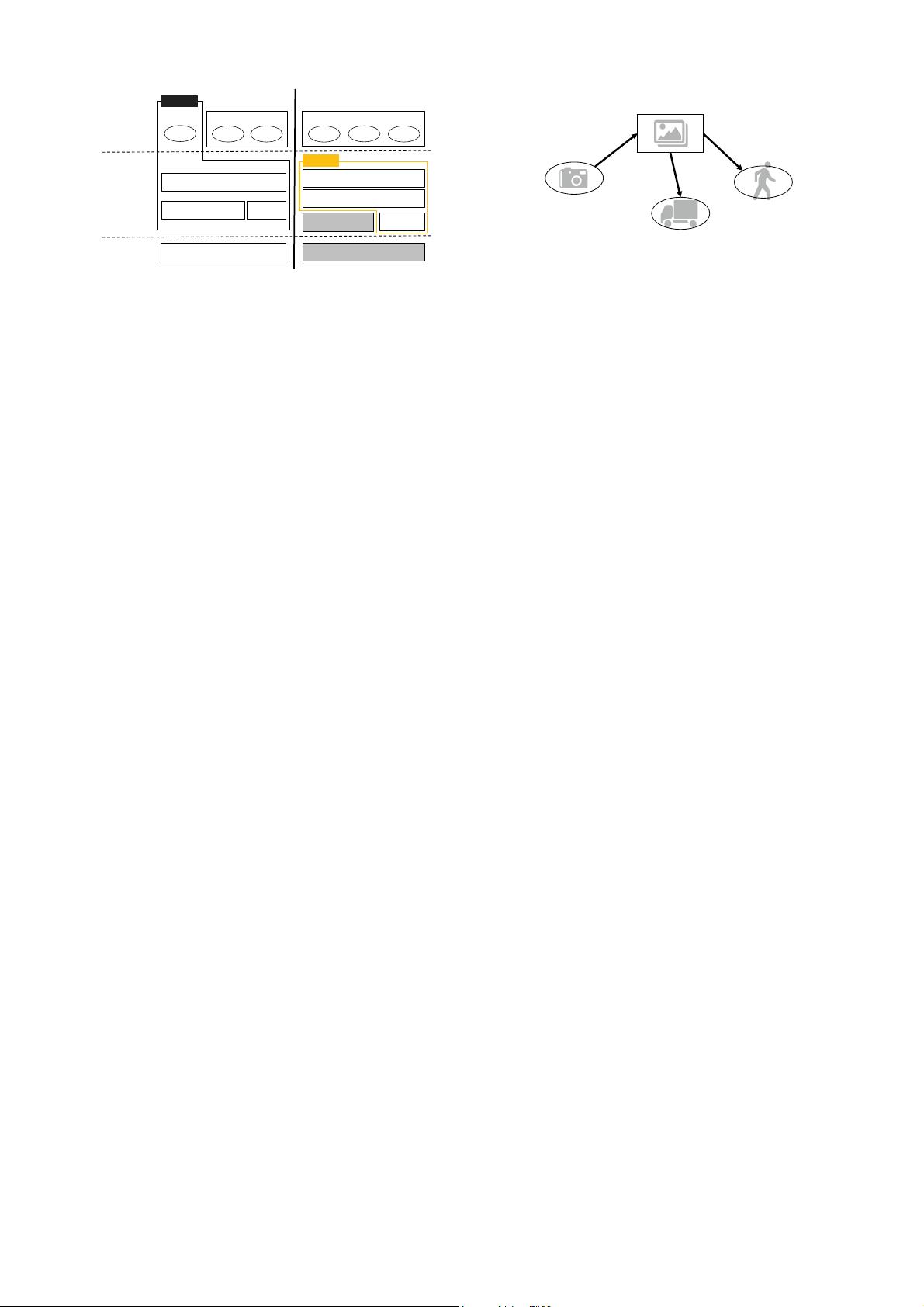
of the message by the topic name. As a node publishes a
message to a topic,anothernode subscribes to the topic
and utilizes the message. For example, as shown in Fig-
ure 2, the “Camera” node sends messages to the “Images”
QRGH
QRGH
QRGH
6XEVFULEH
3XEOLVK
6XEVFULEH
WRSLF
&DU'HWHFWLRQ
3HGHVWULDQ
'HWHFWLRQ
&DPHUD
,PDJHV
Figure 2: Example of ROS publish/subscribe model.
topic.Themessages in the topic are received by the “Car
Detection” node and “Pedestrian Detection” node. The pub-
lish/subscribe model is designed to be modular at a fine-
grained scale and is suitable for distributed systems.
In ROS1, the above communication system is implemented
as middleware based on TCPROS and UDPROS using TCP
and UDP sockets. When subscriber-nodes and publisher-
nodes are launched, they interact with a master-node that
collects information and manages topics, similar to a server.
After an XML/Remote Procedure Call (RPC) transaction
with the master-node, subscriber-nodes request a connection
to publisher-nodes, using an agreed upon connection proto-
col. Actual data (i.e., a message) is transported directly
between nodes. This data does not route through the mas-
ter. ROS1 realizes a peer-to-peer data transport between
nodes.
Optionally, ROS1 provides nodelets, which provide effi-
cient node composition for optimized data transport without
TCPROS and UDPROS. A nodelet realizes non-serialized
data transport between nodes in the same process by pass-
ing a pointer. ROS2 inherits this option as intra-process
communication, which addresses some of the fundamental
problems with nodelets (e.g., safe memory access).
ROS2 adopts DDS as its communication system. How-
ever, as an exception, intra-process communication is exe-
cuted without DDS. DDS is provided by many vendors and
has several implementation types. Developers can select an
appropriate DDS implementation from a variety of DDS ven-
dors.
2.2 Data Distribution Service (DDS)
The DDS specification [21] is defined for a publish/subscribe
data-distribution system by the Object Management Group
(OMG) [1]. The OMG manages the definitions and stan-
dardized APIs; however the OMG hides the details of im-
plementation. Several implementations have been developed
by different vendors (e.g., RTI [29] and PRISMTECH [25]).
DDS supports a wide range of applications, from small em-
bedded systems to large scale systems, such as infrastruc-
tures. Note that distributed real-time embedded systems
are also supported.
The core of DDS is a Data-Centric Publish-Subscribe (DCPS)
model designed to provide efficient data transport between
processes even in distributed heterogeneous platforms. The
DCPS model creates a “global data space” that can be ac-
cessed by any independent applications. DCPS facilitates
efficient data distribution. In DDS, each process that pub-
lishes or subscribes to data is called a participant, which cor-
responds to a node in the ROS. Participants canreadand
write from/to the global data space using a typed interface.
As shown in Figure 3, the DCPS model is constructed of
DCPS Entities: DomainParticipant, Publisher, Subscriber,
下载后可阅读完整内容,剩余10页未读,立即下载
相关推荐






越来越胖了_mengleijin
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开








最新资源
- VC++经典示例:图像处理与界面开发灵感
- Delphi 6.0开发的个人通讯簿管理系统功能介绍
- ASP.NET三层架构留言板实例教程
- 《AutoCAD Electrical 2008 魔兽学习笔记》入门教程解析
- 易语言数据库中间件源码解析与操作指南
- 探索纽约大学数学建模讲义的独特见解
- FastReport新版本帮助文档发布
- 定时关机与文件夹加密的神器软件
- Dockerfile Maven插件:Maven项目自动化生成Dockerfile
- ENC28J60网络驱动示例程序与仿真教程
- DSP环境下213卷积码编解码器调试与仿真
- C#开发的三维权限管理系统在DotNet2005中的应用
- 安博教育推荐的screen2录屏软件
- Apache CXF 3.2.0版本压缩包发布
- 程序窗口隐藏精灵:一键隐藏任务栏程序
- TimingLockScreen:Java实现的定时锁屏工具






















