FBs-PLC集成NC定位控制:功能介绍与应用优势
需积分: 50 156 浏览量
更新于2024-07-16
收藏 2.7MB PDF 举报
本资源是一份关于永宏FBs-PLC的NC定位控制功能详细介绍的PDF文档,主要关注于工业自动化领域。FBs-PLC作为一种集成解决方案,将传统的NC定位控制器功能集成在SoC芯片内,旨在提高系统的灵活性、降低成本并提升控制精度。文档首先介绍了NC定位控制的背景,指出在追求效率和精度提升的现代机械生产中,一般的电机已经无法满足快速定位和高精度需求,专用NC定位控制器在此时显得尤为重要。
13章详细探讨了PLC与步进或伺服电机的几种控制方式,包括数字I/O方式(虽然简单但灵活性有限)、模拟量输出(灵敏但成本高且易受噪声影响)、通讯方式(非标准化且受限于通讯速度)和高速脉冲方式(成本低且控制精准)。高速脉冲方式因其易用性和准确性成为主流,尤其当PLC具备多轴高速脉冲输出和硬件计数器时,能够实现高效定位控制。
文档接着区分了两种常见的NC伺服系统:半闭环控制和闭环控制。半闭环系统简单且精度适中,适用于大多数应用场景,但位移信息可能受传动机构的影响不精确。闭环控制系统则通过额外的位移检测器实时反馈实际位移,能提供更精确的控制,并能补偿传动机构的磨损和老化影响。
在坐标系统方面,文档提到了绝对坐标和相对坐标的概念。绝对坐标定位是基于固定参考点测量移动距离,而相对坐标则是基于当前位置的增量测量,两者在不同的控制场景下各有优势。
这份文档深入浅出地解释了永宏FBs-PLC如何利用NC定位控制技术来提升设备性能,以及在实际应用中的选择和优化策略。对于从事自动化控制和PLC编程的专业人士来说,这是一个极具价值的学习和参考资源。
13-8
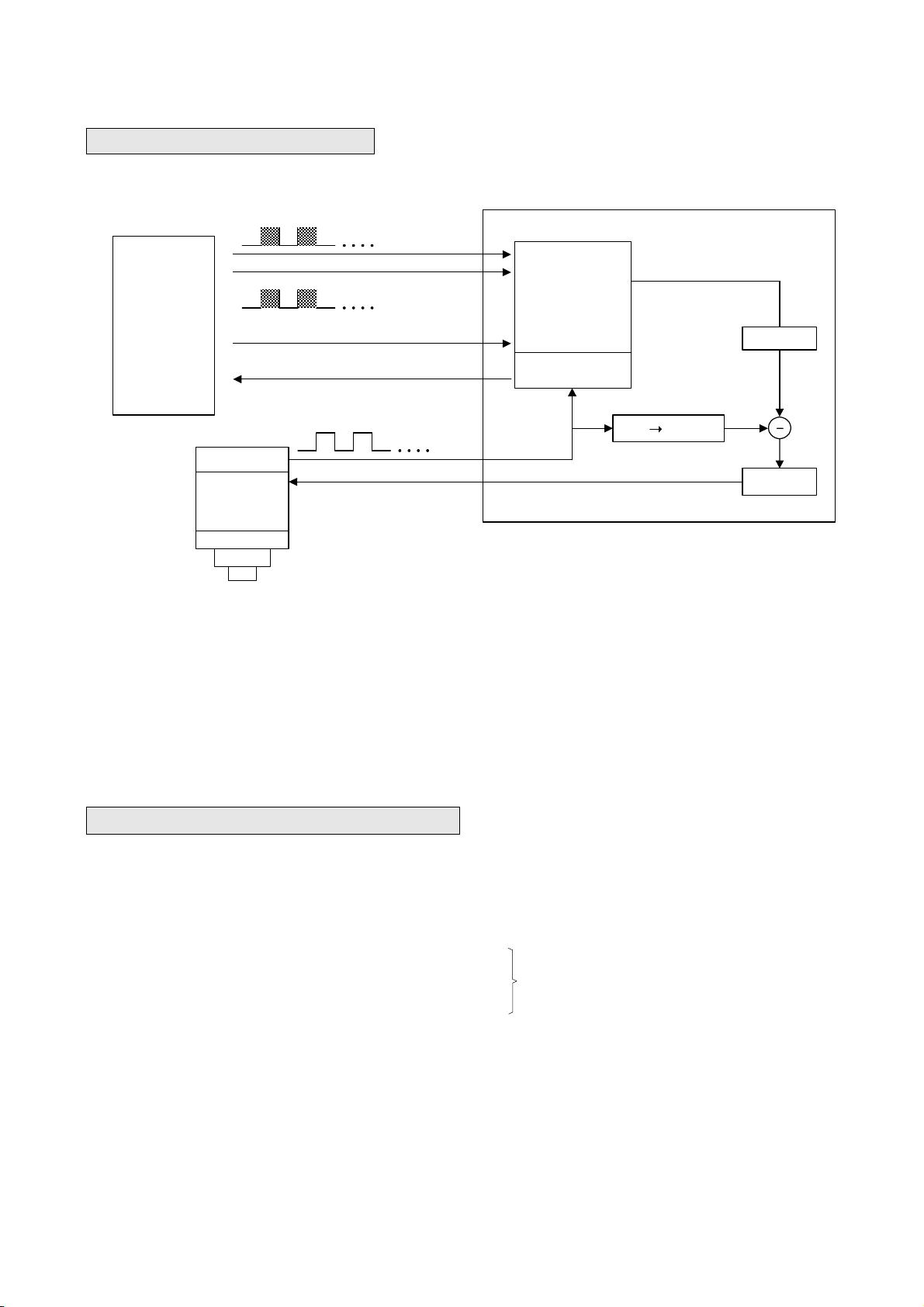
13.5.3 伺服电机工作示意图
FBs-XXMN
(CLR)
(Finish)
/
D/A
F V
h 伺服电机的编码器(Encoder)将位移检测信号反馈到伺服驱动器,驱动器将输入信号的
脉冲频率和脉冲数与回馈信号的频率和脉冲数,经内部的偏差计数器与频率转电压电路处
理后,得到脉冲偏差值与转速误差值,这样使控制伺服电机实现高速、精密的速度与位置
闭环回路处理系统。
h 伺服电机的转速与输入信号的脉冲频率成正比,而电机的移动量则由脉冲数决定。
h 一般而言,伺服电机控制误差为± 1 个脉冲。
13.6 NC 定位控制指令的功能说明
FBs-PLC 的 NC 定位控制相关的指令,如下四个指令。
h FUN140( HSPSO)高速脉冲输出指令,包含如下的 8 个衍生定位指令:
1. SPD 5. ACT
2. DRV 6. EXT
3. DRVC 7. GOTO
4. WAIT 8. MEND
h FUN141( MPARA)定位参数设定指令
h FUN142( PSOFF)强制停止脉冲输出指令
h FUN143( PSCNV)当前脉冲值转换为显示值指令
现就上述四个指令分别作功能说明:
用来编写定位程序存入
FUN140 的 SR 参数区
剩余43页未读,继续阅读
376 浏览量
277 浏览量
289 浏览量
277 浏览量
104 浏览量
101 浏览量
221 浏览量

weixin_38743968
- 粉丝: 404
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- PyDeduplication:大多数只是重复数据删除
- restmachine:用于PHP的Web机器实现
- torch_sparse-0.6.4-cp38-cp38-win_amd64whl.zip
- EMD matlab相关工具(包含EEMD,CEEMDAN)
- matlab的slam代码-ORB_SLAM2_error_analysis:ORB_SLAM2_error_analysis
- jdk1.8安装包:jdk-8u161-windows-x64
- head-in-the-clouds:与提供商无关的云供应和Docker编排
- init:环境初始化脚本
- 英雄
- torch_cluster-1.5.6-cp36-cp36m-win_amd64whl.zip
- 关于VSCode如何安装调试C/C++代码的傻瓜安装
- 导航菜单下拉
- Bird
- raspberry-pi-compute-module-base-board:Raspberry Pi计算模块的基板
- 晶格角
- thrift-0.13.0.zip
