S7-1200与ABB机器人 SOCKET通信详细步骤与示例
版权申诉
127 浏览量
更新于2024-08-04
2
收藏 3.6MB DOCX 举报
本文档详细介绍了如何在S7-1200(Siemens PLC)与ABB机器人之间实现SOCKET通信的过程。SOCKET通信是一种基于TCP/IP协议的高级通信技术,它允许设备之间通过网络进行数据交换,常用于工业自动化中的远程监控和控制。
首先,确保在ABB机器人系统的Communication选项中启用616-1PCInterface功能,这是进行SOCKET通信的基础。在RobotStudio软件中,用户需创建新的机器人系统,然后进入“选项”设置,勾选616-1PCInterface以添加此功能至系统属性。
接下来,配置机器人控制器的IP设置。在示教器的“控制面板”->“配置”->“Communication”->“IPSetting”中,添加新的网络连接,指定机器人自身的IP地址(如192.168.0.1),接口选择LAN3,并设置标签为plc_abb。这一步是建立通信链路的关键。
在RAPID编程模块(如Module1)中,编写接收和发送数据的子程序。发送子程序涉及创建和关闭Socket连接,连接到指定的IP和端口(2000),并将机器人侧的数据(存储在send_arr数组中)通过Socket发送出去。同样,接收子程序也包括类似步骤,只是方向相反,从PLC接收数据并存入receive_arr数组。
在S7-1200的PLC侧,用户需要在DB块中创建两个Byte数组变量,分别用于存储接收到的和待发送的数据。这些变量的声明和初始化是主程序的重要组成部分,它们将作为数据交换的载体。
需要注意的是,数组下标在编程时通常从1开始计数,这是与许多编程语言的标准约定一致的。此外,确保在主程序中正确调用这两个子程序,以实现完整的通信流程。
总结来说,本文提供了一个完整的指南,包括了从软件配置到编程实现的每一步,帮助读者理解并实践如何在S7-1200和ABB机器人之间通过SOCKET通信进行数据交互,这对于集成工业自动化系统和实现远程监控至关重要。
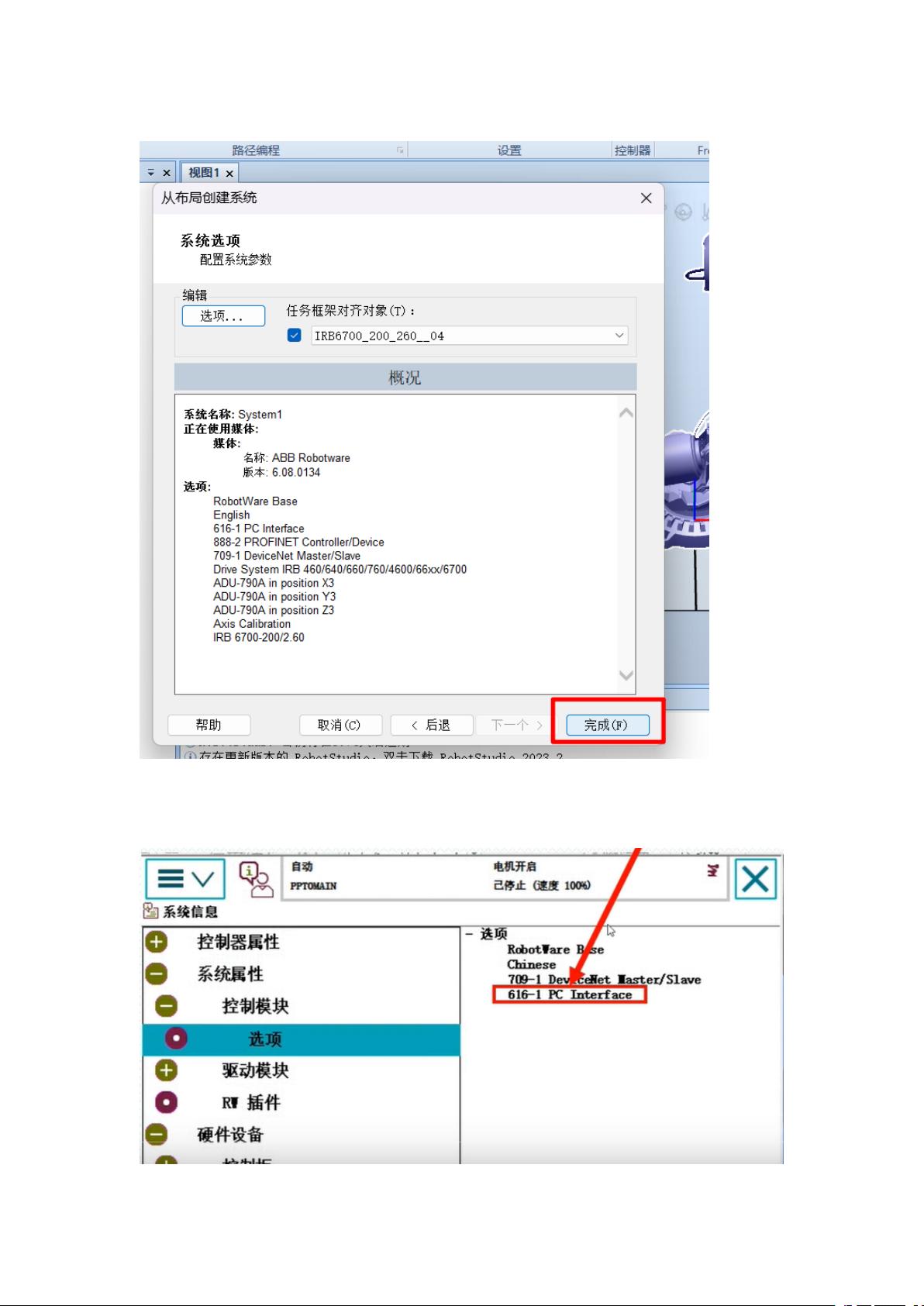
最后,点击完成,
如下图所示,打开示教器,在系统属性—控制模块—选项中可以看到已经成功添加了该选项
功能,
剩余11页未读,继续阅读
1400 浏览量
387 浏览量
1395 浏览量
3178 浏览量
1860 浏览量
595 浏览量
1072 浏览量

AAA_自动化工程师
- 粉丝: 7247
 我的内容管理
展开
我的内容管理
展开







最新资源
- Enslavism:构建高效WebRTC服务器框架的实践指南
- 深度解析Android图片裁剪控件MCropImageView实现
- 易语言:系统工具快速执行专用版源码解析
- 现金处理系统创新设计与行业应用解析
- Python数据分析库Pandas新版本发布
- Windows驱动开发技术详解及调试技巧
- 深入浅出protobuf代码生成工具的使用与原理
- 基于C#的超市交易系统设计与实现
- 使用Python实现的自动网页分类器项目
- Iobit SmartRam内存优化工具:释放更多Chrome内存
- Rails宠物租赁应用开发与Ruby技术实现
- Android自定义控件简易入门与实践指南
- 官方佳能mx490打印机驱动下载与安装指南
- 瓦楞纸支撑架创新设计及其应用研究
- 一键生成QQ与微信个性签名工具
- IKAnalyzer分词工具必备jar包
