"基于模拟退火算法的航天器姿态动力学与控制优化"
带有轮控系统的航天器姿态动力学建模和控制是完成航天任务的重要保障。本文根据任务需求,推导、建立了航天器姿态动力学模型、运动学模型和飞轮数学模型,并设计了PD控制器,基于Simulink实现仿真。通过将航天器姿态控制系统假设为二阶系统,使用近似求解的方法得到了符合性能指标的PD参数。为进一步优化控制参数,本文采用了模拟退火算法。
文章首先介绍了航天器姿态动力学的基本概念和建模方法。通过对航天器的几何特征和运动规律进行分析,推导了航天器姿态动力学模型和运动学模型,并将其转化为矩阵形式。同时,考虑到航天器姿态变化的非线性特性,作者又引入了飞轮数学模型,并将其与航天器姿态动力学模型进行耦合,建立了完整的航天器姿态控制系统模型。
接着,本文详细介绍了PD控制器的设计和Simulink仿真实现。PD控制器是一种经典的反馈控制器,通过比较实际姿态与期望姿态的差异,并根据差异的大小调整控制输入,实现姿态的调节。作者根据航天任务的要求和性能指标,选择了适当的PD参数,并使用Simulink软件搭建了航天器姿态控制系统的仿真模型。通过仿真实验,验证了PD控制器对航天器姿态的调节效果和稳定性。
为了进一步提高控制系统的性能,本文引入了模拟退火算法对PD参数进行优化。模拟退火算法是一种随机优化算法,通过模拟金属退火的过程,搜索全局最优解。作者根据航天器姿态控制系统的特点,设计了合适的目标函数和参数范围,并利用模拟退火算法搜索了最优的PD参数组合。仿真结果表明,经过模拟退火算法优化后的PD参数能够使航天器姿态调节更加精确和稳定。
最后,为了进一步验证控制系统的性能,本文加入了加分环节的控制效果,并提供了部分源码供读者参考。通过加分环节的仿真实验,可以看出控制系统在不同工况下的响应和调节能力。同时,为了方便读者深入学习和研究,作者承诺通过私信免费提供相应的Simulink程序。
综上所述,本文通过航天器姿态动力学的simulink仿真,结合模拟退火算法优化控制参数的方法,实现了航天器的姿态控制。文中详细介绍了建模过程、控制设计及仿真实验,并给出了优化后的控制参数组合。该研究成果虽然只是一篇本科课程报告,但其水平已经超过了部分硕士毕业论文。本文的研究方法和结果对于相关课程的学习和任务的完成具有参考价值,为进一步研究和应用航天器姿态控制提供了一定的借鉴和参考。
20 级航空航天工程
1
航天器姿态控制课程报告
第 1 章 总体任务
1.1 基本要求
(1)建立带有飞轮的三轴稳定对地定向航天器姿态动力学和姿态运动学模型;
(2)设计 PD 或 PID 控制器的轮控系统;
(3)完成数学仿真与分析。
1.2 具体参数
(1)建立带有飞轮的对地定向多刚体航天器姿态动力学和姿态运动学模型。
(2)设航天器在圆轨道上运行,轨道角速度
0
0.001rad s
=
。
(3)姿态动力学采用基于陀螺体的多刚体姿态动力学方程;姿态运动学模型采用 zyx 顺
序欧拉角的姿态运动学方程;
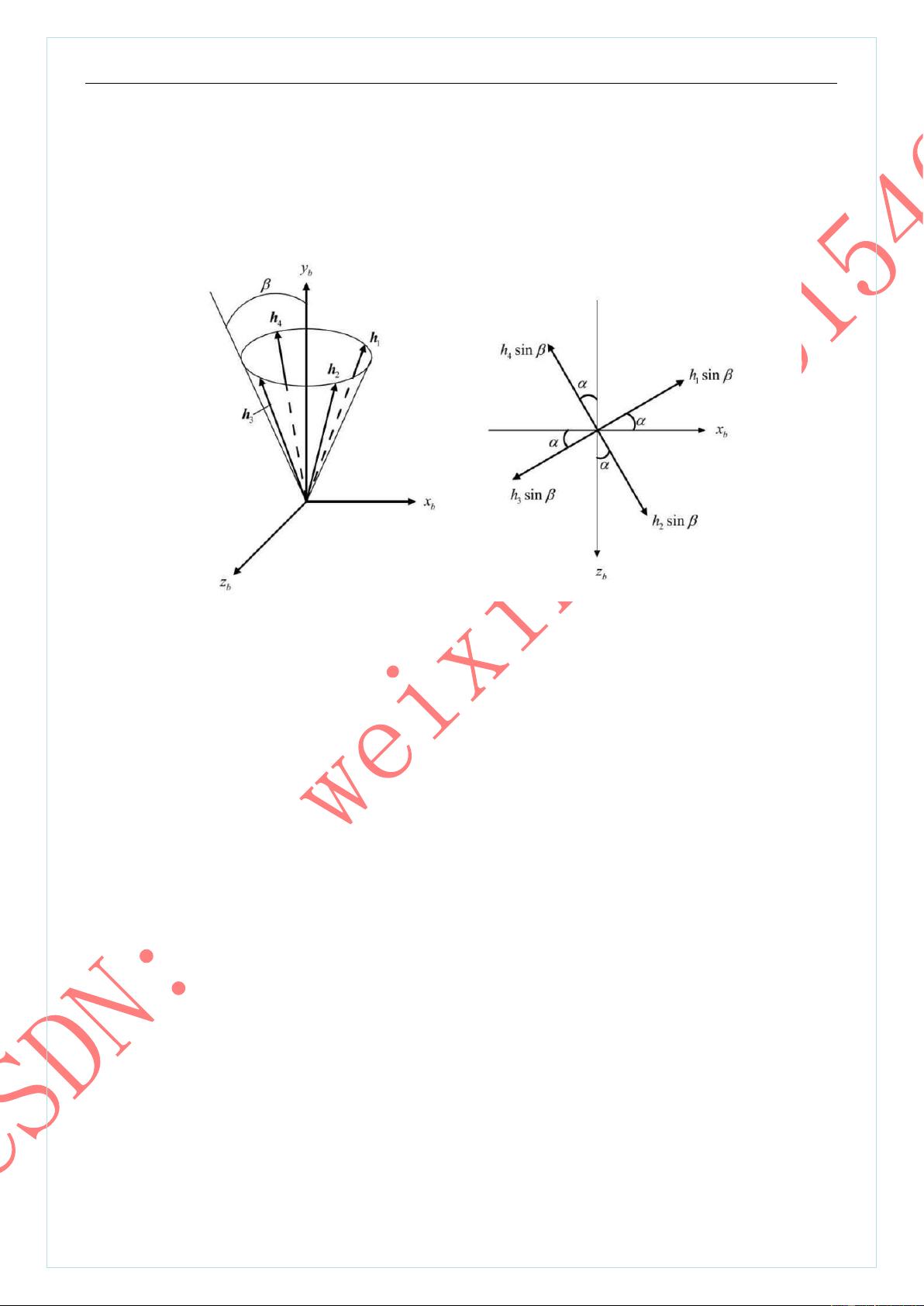
(4)采用 4 斜装的反作用飞轮构型方案,转动惯量 40kgm
2
,
54.74 , 45
==
。安装位
置见图 1。
(5)建立飞轮的数学模型,设飞轮提供最大控制力矩为
0.4Nm
,最大角动量
20Nms
。飞
为力矩模式飞轮,模型采用一阶惯性环节(时间常数 0.008s),考虑库伦摩擦力矩
4
4 10 Nm
−
和粘性摩擦
8
1.3 10 Nms rad
−
,要求飞轮的数学模型带有饱和特性。
(6)以欧拉角为姿态参数,控制器采用 PD 或 PID 控制律。
(7)控制指标和性能要求:
姿态角:优于 0.1deg(3σ),姿态角速率:优于 0.001deg/s(3σ)。
要求控制系统的调整时间优于 80s,阻尼比大于 0.60。
(8)进行闭合回路数学仿真
初始姿态角为 3º~5º,姿态角速度 0.05º/s ~0.1º/s。
(9)考虑设星体三轴方向所受到的干扰力矩分别为:
2 2 2
2 2 2
2300kgm , 420kgm , 2300kgm
22kgm , 18kgm , 20kgm
x y z
xy xz yz
I I I
I I I
= = =
= = =
剩余57页未读,继续阅读

weixin_50951546
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- ITween插件实用教程:路径运动与应用案例
- React三纤维动态渐变背景应用程序开发指南
- 使用Office组件实现WinForm下Word文档合并功能
- RS232串口驱动:Z-TEK转接头兼容性验证
- 昆仑通态MCGS西门子CP443-1以太网驱动详解
- 同步流密码实验研究报告与实现分析
- Android高级应用开发教程与实践案例解析
- 深入解读ISO-26262汽车电子功能安全国标版
- Udemy Rails课程实践:开发财务跟踪器应用
- BIG-IP LTM配置详解及虚拟服务器管理手册
- BB FlashBack Pro 2.7.6软件深度体验分享
- Java版Google Map Api调用样例程序演示
- 探索设计工具与材料弹性特性:模量与泊松比
- JAGS-PHP:一款PHP实现的Gemini协议服务器
- 自定义线性布局WidgetDemo简易教程
- 奥迪A5双门轿跑SolidWorks模型下载
