2D机器视觉机器人标定与偏移量精准计算详解
需积分: 37 112 浏览量
更新于2024-07-02
2
收藏 875KB PDF 举报
2D机器视觉机器人标定与偏移量计算总结是一篇关于在工业自动化领域中,如何利用2D视觉系统来精确引导机器人执行任务的详尽指南。文章主要关注于单相机和多相机在不同应用场景下的标定方法,以及如何处理标定中的偏移量计算。
首先,单相机引导策略包括StdxStdy方法和旋转中心法。StdxStdy方法适用于相机固定安装或与机器人集成,先拍照再取料,适合放料位置有一定角度的情况。旋转中心法则强调先取料后拍照,适用于相机固定且旋转中心不在相机视野中心的场景,确保取到的物料姿态固定。
工件坐标系法是针对多工位装配,通过单相机拍摄并标记单个物料,然后由机器人或自定义的X/Y/T轴机构进行精确定位。这种方法适用于需要高精度对齐的情况。
对于双相机或多相机引导对位贴合,这些系统通过多视角捕捉同一物料,利用运动控制平台来实现精细定位和对齐。这种方案在确保物料对齐精度上更具优势。
单相机引导时,对相机进行非线性标定至关重要,特别是当FOV较大(大于20mm)且系统精度要求高时。使用棋盘格进行标定,区分实物标定(机器人多次取放产品)和尖锥扎点法(精度较低,需要额外加工尖锥)。标定过程包括九点标定,通过相机与机器人或工作台坐标系的关联,确定位置偏移。
具体操作步骤包括相机固定拍摄、从上向下或从下向上拍照,以及机器人与相机联动或相机在固定位置拍照等,确保标定的准确性。尖锥对位法虽然简便,但由于精度受限,通常不推荐使用。
本文提供了一个全面的框架,涵盖了2D视觉机器人标定的各个环节,无论是单相机还是多相机的配合,都涉及到关键的标定技术、执行机构的选择以及如何处理偏移量,这对于优化生产线效率和提高产品质量具有重要意义。
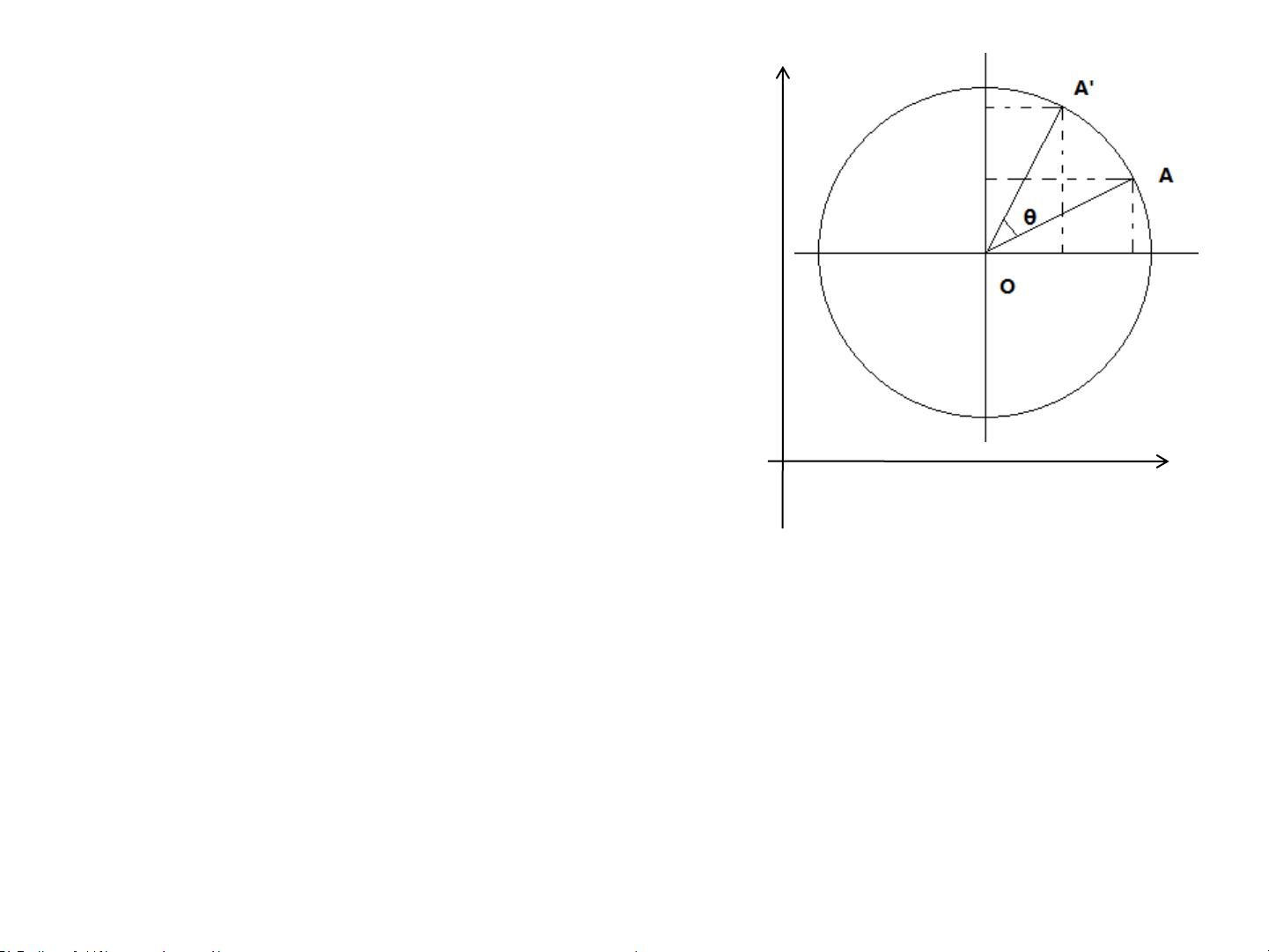
旋转中心计算公式
A(X,Y)点绕 任意点 旋转θ 后的坐标。
X’ – Xo = cos θ * (X-Xo) – sin θ *(Y-Yo) ;
Y’ – Yo = cos θ* (Y-Yo) + sin θ* (X-Yo);
X:旋转前的特征物的平台坐标。
X’:一次对位旋转后特征物的平台坐标
Xo’:为固定值,事先可以校正。
Y、Y’同理。
X’ = cos θ * (X-Xo) – sin θ *(Y-Yo) + Xo;
Y’ = cos θ* (Y-Yo) + sin θ* (X-Xo) + Yo;
注释:此领域如果运用到机械手或者平台在固定的姿态(盲抓)下旋转
时,旋转轴的旋转中心是永远不变的。旋转轴的旋转中心Xo’计算方
法是: 旋转轴旋转180°,X/2、Y/2.经过多点标定后进行代入公式计
算,但是很多场景不允许转180度。
平台X轴
平台Y轴
(Xo ,Y
o)
(X’, Y’)
(X , Y)
剩余34页未读,继续阅读
2024-10-06 上传
2010-09-18 上传
2024-06-17 上传
2024-05-25 上传
2009-07-17 上传
2021-10-04 上传
2012-06-25 上传
点击了解资源详情

特洛夫斯基
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
