




激光扫描机构外参标定:垂直约束方法
版权申诉
131 浏览量
更新于2024-06-26
收藏 1.14MB DOCX 举报
"本文主要探讨了基于垂直约束的激光扫描机构外参标定算法,针对激光传感器在场景识别、定位导航等任务中的应用,提出了不同的标定方法。这些方法主要涉及利用特征点(如棋盘格角点)或空间特征(如平面、直线)来求解传感器坐标系与固定坐标系之间的转换参数。尽管使用天然场景特征可以减少工作量,但在某些情况下,如小型激光检测机构,人造特征点标定更适用。然而,该方法存在特征点缺失、坐标不匹配及形状畸变等问题,需要解决。"
在激光扫描机构的外参标定过程中,不同系统和应用场景需要不同的标定策略。Zhang等人使用棋盘格角点作为特征点,通过点面约束来确定摄像头和激光传感器的相对位置,而Geiger等人则利用多块棋盘格和图像与激光点云的匹配来求解外参。Zou等人通过计算DoN特征并利用点面约束求解激光与全景相机的联合标定。胡钊政等人则提出了基于PNP问题的混合测距系统标定方案。
此外,研究人员还探索了利用空间特征进行标定的新方法。Atanacio-Jiménez等人借助5个已知位姿的标定平面来标定激光雷达,Chen等人通过霍夫变换检测的线特征实现共面约束的标定,Zhou等人则利用直线和平面共面性构建标定方程,通过代数结构求解。
近年来,利用场景中自然特征的标定方法受到关注,例如Gomez-Ojeda等人利用场景拐角进行线面和点面约束的标定,Liao等人直接提取图像和点云中的线特征,通过特征匹配优化外参。Gong等人则提出了一种无目标的双激光雷达系统标定方法,利用局部地图的同构性进行外参估计。
平面扫描仪作为一种纯激光扫描设备,广泛应用于3D打印、缺陷检测和曲面重建等领域。对于这类设备,由于工作空间有限,人造特征点标定可能是更可行的选择。然而,这种方法面临特征点不足、坐标不一致和形状变形等挑战,这为后续研究提供了改进和优化的方向,即如何在保证标定精度的同时,克服这些存在的问题。
RR 为旋转矩阵. 考虑式(1), 若点 PP 在 SiSi 中的齐次坐标为 Pi,Pi, 则
Pi=Mi1P1=Mi1M1wPw=MiwPwPi=M1iP1=M1iMw1Pw=MwiPw
(4)
Mi1M1i 是 M1iMi1 的逆变换, 根据式(2)单应性矩阵 MiwMwi 可表示为
Miw=(R0−l1ixX−l1iyY+T1)Mwi=(R−lx1iX−ly1iY+T01)
PwPw 已知, PiPi 由探头测量得到, 因此可通过式(4)求解得到 Miw.Mwi.PwPw 的 z 分量
为 0, 确定 MiwMwi 需求解 9 个未知数. 一组对应的 Pw,Pw, PiPi 可提供三个方程, 一次扫
描中需要三组对应点以求解 MiwMwi.
若在不同位置的扫描中得到了新的单应性矩阵 Mjw,Mwj, 那么可得到如下关系
Miw−Mjw=(00(l1jx−l1ix)X+(l1jy−l1iy)Y0)Mwi−Mwj=(0(lx1j−lx1i)X+(ly1j−ly1i)Y00)
上式是只与 X,X, YY 相关的标定方程. 两个不同的单应性矩阵, 可以确定一个方程. 如
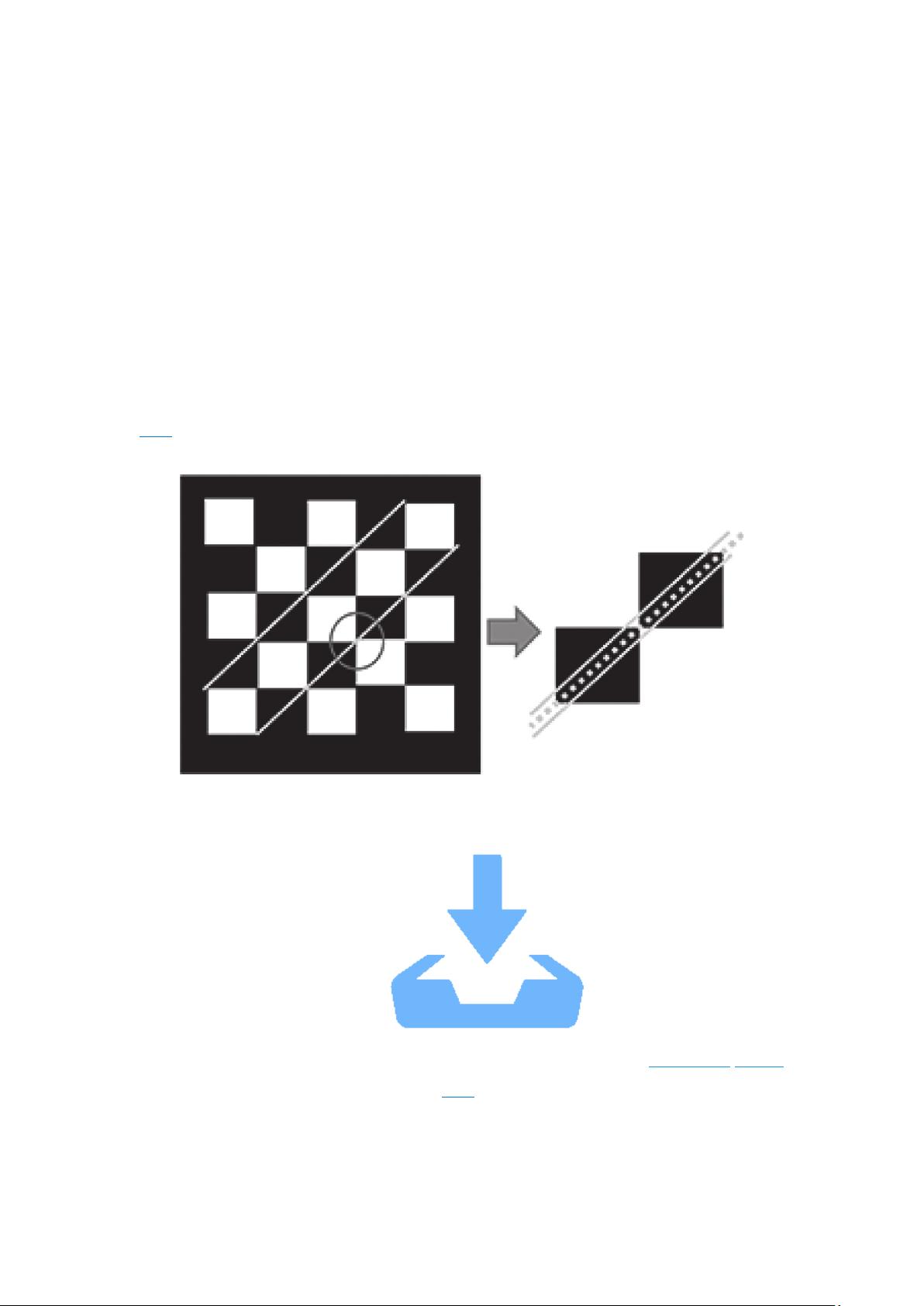
图 2 所示, 设计尺寸合适的棋盘格标定板使单条扫描线覆盖多个角特征点, 从而计算单应性
矩阵.
图 2 棋盘标定板与特征点缺失
Fig. 2 Chess calibration board and lack of feature points
下载: 全尺寸图片 幻灯片
实际测量中, 存在特征点缺失的现象: 图 2 中虚线为理想状态下扫描线覆盖域, 角点恰
好能被扫描; 实线为实际扫描时扫描线覆盖域, 此时角点无法被探测. 角点位置反射条件变
化快, 探测结果发生震荡, 也可能引起特征点缺失. 这些因素会使角点计算误差变大或者无
下载后可阅读完整内容,剩余16页未读,立即下载
664 浏览量
1623 浏览量
1111 浏览量
2022-11-29 上传
2023-02-23 上传
2158 浏览量
115 浏览量

罗伯特之技术屋
- 粉丝: 4596
 我的内容管理
展开
我的内容管理
展开








最新资源
- jQuery消息提示插件Messager v1.5新特性介绍
- 微机与单片机原理期末试题解析
- Linux高级编程:全面教程与设计指南
- 微软Vista凭证提供程序样例指南
- C#控制台应用:实现七彩字符输出技巧
- 智能家居中ZigBee节点协调器的IAR开发与C语言编程
- VHDL语言仿真的CPU与运算器级联技术研究
- Flish Scription脚本语言编程知识问答
- 电脑录音软件:记录声音,分享美妙歌声
- 深入解析OPC SDK 3.00:核心组件开发工具的介绍
- CISCO网络命令学习资源介绍与指南
- VisualSVN Server 2.5.7 安装与配置指南
- 浙江省计算机2级C语言PPT习题解析
- C#电话本项目课程设计:控制台应用与数据管理
- PHP留言编辑器:轻松编辑与个性化设置
- 专科计算机导论课件的全面概述与结构解析






















