使用JLink_V8调试S3C6410裸机程序步骤
需积分: 9 175 浏览量
更新于2024-09-14
收藏 171KB PDF 举报
"这篇文档详细介绍了如何使用JLink_V8调试基于S3C6410处理器的裸机程序,主要包括软件安装、调试器配置、烧录U-BOOT以及加载程序到内存等步骤。"
在嵌入式系统开发中,调试是极其关键的一环,特别是在没有操作系统支持的裸机环境下。本文档主要讲述了使用JLink调试工具配合RealView Developer Suite (RVDS) v2.2来调试基于S3C6410处理器的程序。S3C6410是一款高性能的ARM Cortex-A8处理器,广泛应用于各种嵌入式设备。
**Step1: 安装RealView Developer Suite v2.2**
首先,需要安装RVDS v2.2,这是一款由ARM公司提供的强大的开发工具套件,包含了编译器、调试器和其他工具,用于开发针对ARM架构的应用程序。安装过程遵循Readme.Txt文件的指导。
**Step2: 安装JLinkARM V410i**
确保安装JLinkARM的4.10版本,因为更高版本可能不支持S3C6410的调试。JLink是SEGGER公司出品的一种通用的仿真器和编程器,它能与多种微控制器进行通信,支持多种调试协议。
**Step3: 配置调试器**
在RVDS中,有两个调试器可供选择:AXDdebugger v1.31和Realview Debugger v1.8。这里以AXDdebugger为例,通过“Option->ConfigureTarget”添加JLinkRDI.dll配置调试器。确保开发板与JLink正确连接,并为开发板供电。
**Step4: 烧写U-BOOT**
在S3C6410开发板上烧写适用于Linux 2.6.28的U-BOOT。U-BOOT是一个开放源代码的Bootloader,负责初始化硬件,如PLL和DDR RAM,以便将程序加载到内存中进行调试。烧写方法参见"TE6410开发板LINUX2.6.28用户手册.pdf"。
**Step5: 开始调试**
完成以上步骤后,开发板上电,打开AXDdebugger并加载要调试的.axd文件。在使用RealView Linker时,需要注意ROBase选项的设置,由于JLink不支持MMU,因此ROBase应使用实际地址,如0x50200000,这是S3C6410 DDR RAM的起始地址。
相关文件包括:
- 6410_test.Zip:一个S3C6410在RVDS下的测试工程,开发者可以通过这个工程学习和实践调试流程。
- Setup_JLinkARM_V410i.Zip:JLink的安装程序,用于与S3C6410进行通信和调试。
调试S3C6410的裸机程序需要正确的软件环境、Bootloader、硬件连接以及合理的程序配置。通过本文档提供的步骤,开发者可以有效地进行调试工作,解决开发过程中遇到的问题,提高开发效率。
S3C6410 的 JLink 调试 方法
保定飞凌
Step1
安装 RealView Developer Suite v2.2
具体安装方法参考 RVDS2.2 目录下的 Readme.Txt 文件
安装成功后会出现
程序 - 〉 ARM-> RealView Developer Suite v2.2
Step2
安装光盘上的 Setup_JLinkARM_V410i.zip
注意 一定好安装 4.10 版本。目前官网上最新的 4.14 版本不能正常调试 6410 。
Step3
正确安装 RDS2.2 后会出现两个调试器。 AXD debugger v1.31 和 Realview Debugger v1.8
这里以 AXD debugger 为例介绍 JLink V8 的使用。
正确连接开发板和 JLink 。给开发板上电
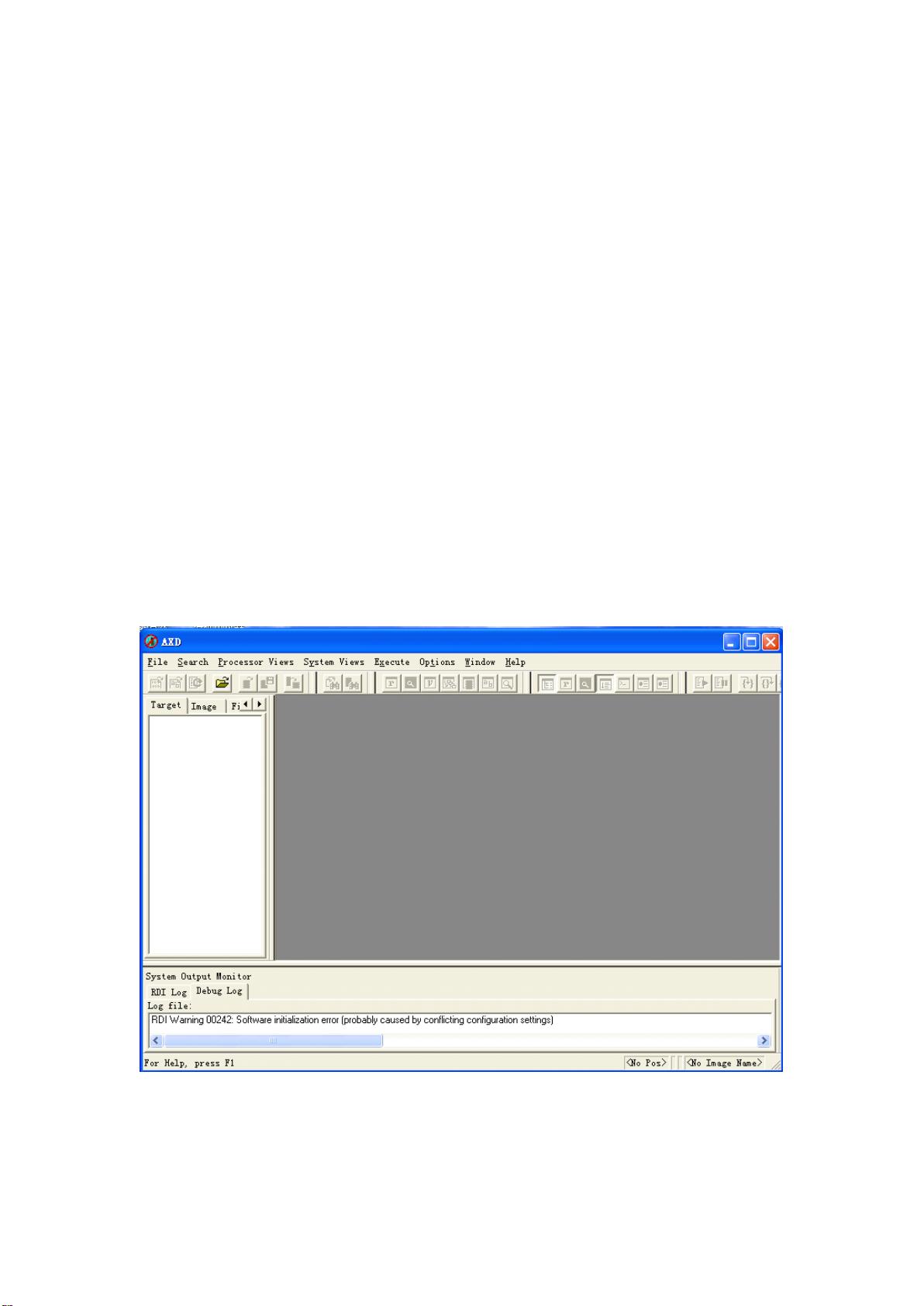
打开 AXD debugger.
Option->Configure Target
下载后可阅读完整内容,剩余3页未读,立即下载
192 浏览量
点击了解资源详情
345 浏览量
点击了解资源详情
点击了解资源详情
124 浏览量
2010-06-18 上传

arm2linux
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- HUMmer-开源
- README-Generator
- 自定义基于接口,实体类注解脱敏
- XYCMS留言板 v7.4
- flutter-rechargeApp-md5-674a298f5659de080bb22ea002de4fbf
- RRT轨迹规划算法matlab程序
- calculator
- 在Rust中从头开始克隆SQLite-Rust开发
- Tnotes_app:任务和笔记Flutter应用
- 计算机辅助几何设计与非均匀有理B样条 修订版 实例 教程 软件
- 基于JAVASwing的贪食蛇小游戏 键盘事件监听 多线程 文件IO 自取
- js-programming-assignment-1-APozin558:教室为GitHub创建的js-programming-assignment-1-APozin558
- Download Accelerator Plus v10.0.0.6 Alpha
- PDS-Movie-Competition
- SilexStarter-GanttModule
- ta-技术分析库。 实施指标数量:EMA,SMA,RSI,MACD,随机指标等-Rust开发
