SIFT算法详解:从原理到应用
需积分: 9 89 浏览量
更新于2024-07-26
收藏 2.9MB PDF 举报
"SIFT算法详解及应用"
SIFT(尺度不变特征变换)是由加拿大英属哥伦比亚大学的大卫·劳伊(David G. Lowe)教授在1999年提出的,它是一种强大的图像处理技术,用于提取图像中的关键点和描述符,这些特征在尺度、旋转、光照变化以及一定程度的仿射变换下都具有不变性。SIFT算法的引入旨在解决传统特征提取方法在不同环境条件下的匹配问题,比如不同时间、分辨率、光照和位姿下的图像对应。
SIFT算法主要包括以下几个步骤:
1. **尺度空间极值检测**:首先,通过对图像进行多尺度高斯滤波,构建尺度空间,然后寻找每个尺度下的局部最大值点,这些点被认为是潜在的关键点。
2. **关键点定位**:在确定的候选关键点位置上,进一步精确计算其坐标,以消除噪声和确保关键点的稳定性。
3. **关键点定向**:为每个关键点分配一个方向,通常通过检测关键点周围的梯度方向分布来实现,这样可以确保特征对旋转的不变性。
4. **关键点描述符生成**:在关键点周围的小区域内,计算像素的梯度强度和方向,形成一个描述符向量。这个向量是旋转不变的,并且对光照变化有一定的鲁棒性。
5. **特征匹配**:使用描述符向量进行特征匹配,通常采用距离度量(如欧氏距离或余弦相似度)来找到最佳匹配对。
SIFT算法的应用领域广泛,包括但不限于:
- **图像匹配**:在图像拼接、三维重建、物体识别等领域,SIFT能有效地找到图像间的对应关系。
- **视频分析**:在运动跟踪、行为识别中,SIFT可以帮助识别和追踪目标物体。
- **机器人导航**:在机器人视觉系统中,SIFT用于地标识别和定位。
- **增强现实**:通过SIFT匹配实现虚拟内容与真实世界的准确叠加。
随着时间的推移,SIFT算法也经历了许多扩展和改进,例如SURF(Speeded Up Robust Features)、ORB(Oriented FAST and Rotated BRIEF)、AKAZE(Accelerated Keypoint Detector and Descriptor)等,它们在保持SIFT核心优势的同时,提高了计算效率或增强了在特定情况下的性能。
尽管后来出现了更多快速且高效的特征检测算法,但SIFT仍然是图像处理和计算机视觉领域中的经典算法,其基本思想和原理对后续的许多技术发展产生了深远影响。
Scale Invariant Feature Transform
SIFT
2012/3/27 12
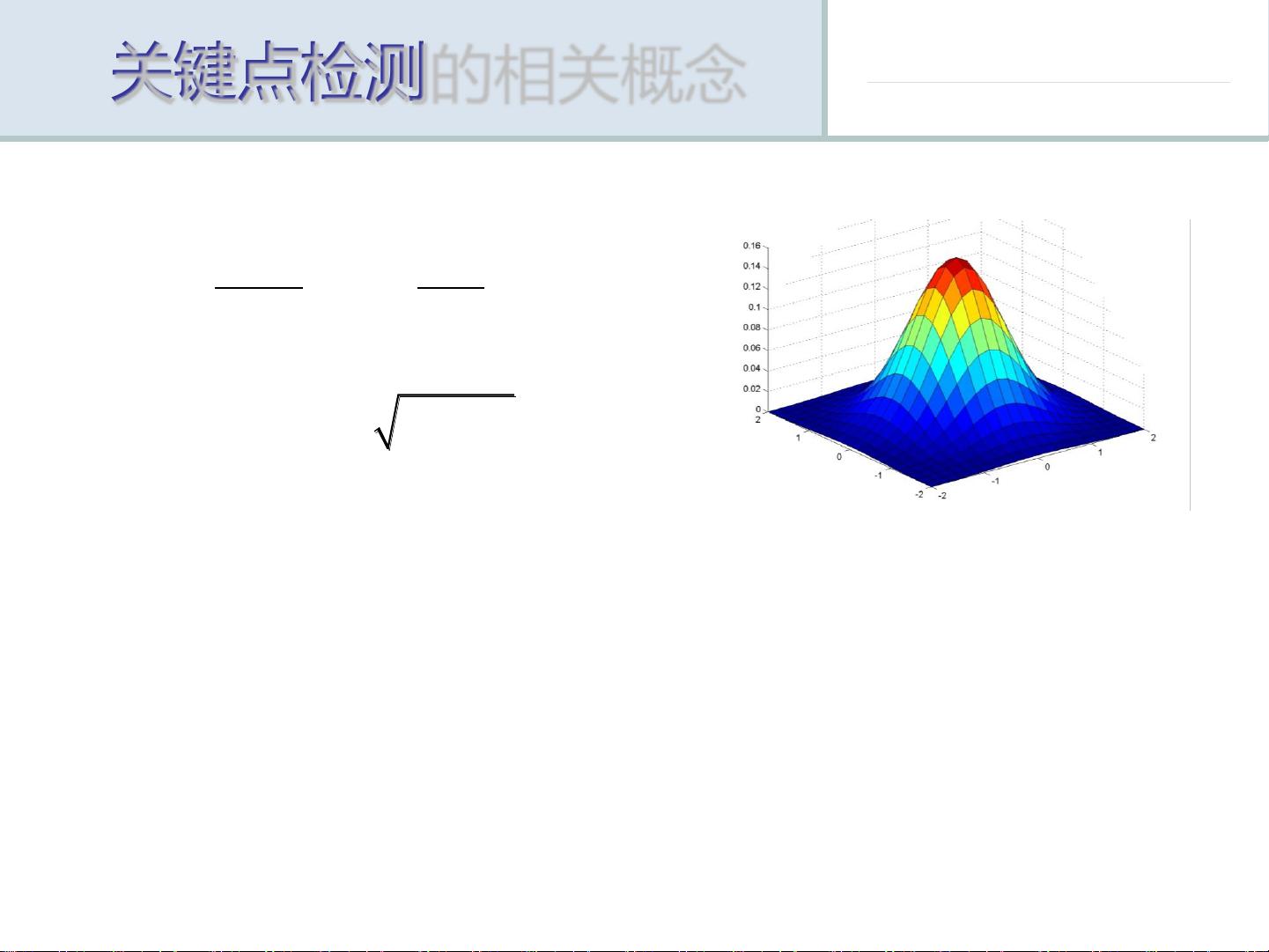
根据文献《Scale-space theory: A basic tool for analysing
structures at different scales》我们可知,高斯核是唯一可以产生
多尺度空间的核,一个图像的尺度空间,L(x,y,σ) ,定义为原始图像
I(x,y)与一个可变尺度的2维高斯函数G(x,y,σ) 卷积运算。
关键点检测
, , , , * ,L x y G x y I x y
22
22
1 ( ) ( )
, , exp
22
ii
ii
x x y y
G x y
高斯函数
尺度是自然存在的,不是人为创造的!高斯卷
积只是表现尺度空间的一种形式…
关键点检测的相关概念
剩余68页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-09-24 上传
2019-06-25 上传
2011-06-12 上传
2021-10-02 上传

晨曦909
- 粉丝: 14
- 资源: 34
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
