使用Buildroot SDK在全志T113上进行CAN通信实验
需积分: 5 144 浏览量
更新于2024-08-04
2
收藏 1.37MB DOCX 举报
"这篇文档是关于在全志T113处理器上,使用Buildroot SDK进行CAN通信验证的教程。实验中,T113与TJA1050 CAN收发器配合,通过USB转CAN转换器连接到CAN总线。教程包括了对Linux内核配置的修改以及CAN驱动的添加,以实现CAN接口的启用和数据发送。"
全志T113在Linux下的CAN通信验证是一个关键的嵌入式系统应用,尤其对于那些需要在汽车电子、工业自动化等领域中使用CAN总线的项目。在这个实验中,开发者使用了Buildroot SDK,一个轻量级的构建系统,用于生成定制的嵌入式Linux系统。
首先,要配置CAN接口,需关闭can0接口,使用命令`ifconfig can0 down`。然后设置CAN接口的波特率,这里是250Kbps,并开启三重采样模式,命令是`ip link set can0 type can bitrate 250000 triple-sampling on`。最后,使用`ifconfig can0 up`命令开启can0接口,使其准备就绪。
发送CAN数据的命令是`cansend can0 123#0001020304050607`,其中`123`是CAN标识符,`0001020304050607`是数据字段。这表明了实验者能够通过命令行工具成功地向CAN总线发送数据。
在硬件层面,CAN通信依赖于TJA1050收发器,它连接到T113的PB2和PB3引脚。确保正确连接到USB转CAN转换器,否则实验无法成功。值得注意的是,如果T113板未连接到CAN收发器或者虽连接了收发器但未连接到总线,实验也会失败。
在软件层面,需要对Linux内核的设备树源文件(dts)进行修改。在`sun8iw20p1-t113-100ask-t113-pro.dts`中增加CAN节点,并定义相应的GPIO功能。同时,修改`sun8iw20p1.dtsi`文件,添加CAN设备节点,指定其注册地址、中断、时钟和复位信息。此外,还需要创建一个名为`touchsun4i_can.c`的驱动文件,这通常包含驱动初始化和数据传输的相关代码。
通过以上步骤,实验者可以利用Buildroot SDK创建一个包含CAN驱动的定制Linux内核,实现全志T113与CAN总线之间的通信。这个过程不仅涵盖了硬件配置,还涉及到了Linux内核驱动程序的编写和调试,对于理解嵌入式系统的CAN通信机制具有重要意义。
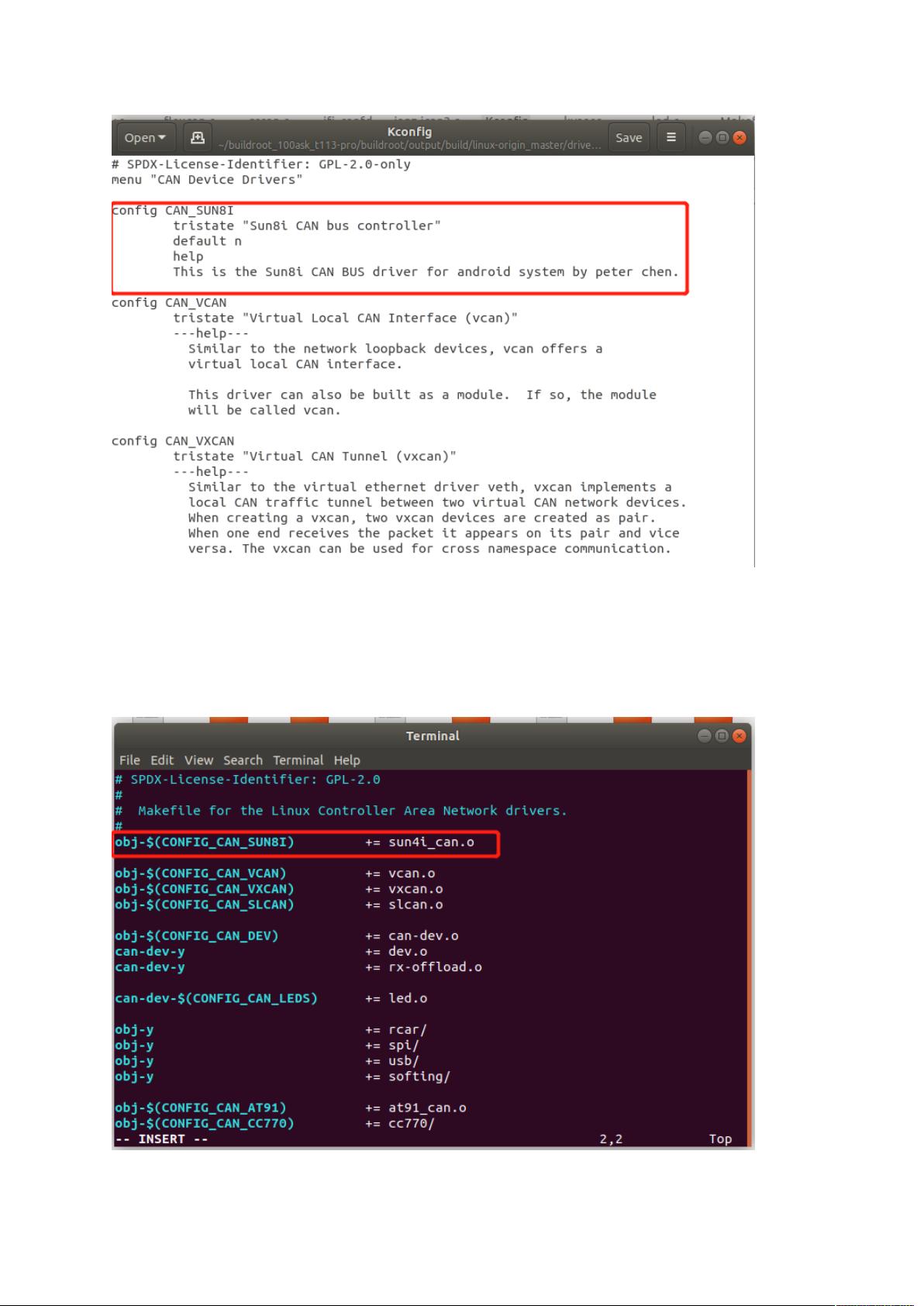
1.5 修改 makefile 文件:
路 径 : /buildroot_100ask_t113-pro/buildroot/output/build/linux-
origin_master/drivers/net/can/Makefile
加入这行:obj-$(CONFIG_CAN_SUN8I) += sun4i_can.o
剩余10页未读,继续阅读
101 浏览量
2021-05-19 上传
点击了解资源详情
点击了解资源详情
2023-04-05 上传
2023-05-24 上传
2023-05-30 上传
2023-05-30 上传

金日油条
- 粉丝: 1
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
