ROS编程入门学习指南:Robot Operating System架构和编程
需积分: 10 20 浏览量
更新于2024-07-15
收藏 3.29MB PDF 举报
ROS编程入门学习资料总结
通过对给定文件的分析,我们可以总结出以下知识点:
**ROS架构与哲学**
* ROS(Robot Operating System)是一个基于发布-订阅模式的分布式框架,用于机器人编程。
* ROS的架构分为三个层次:ROS Master、Nodes和Topics。
* ROS Master是ROS系统的核心,负责管理节点和主题的注册、发现和通信。
* Nodes是ROS系统中的基本单元,负责执行具体的机器人任务。
* Topics是ROS系统中的通信通道,用于节点之间的数据交换。
**ROS节点和主题**
* ROS节点可以是服务器、客户端或中间件,负责执行具体的机器人任务。
* ROS主题是ROS系统中的通信通道,用于节点之间的数据交换。
* ROS主题可以是发布者(Publisher)或订阅者(Subscriber),分别负责发布和订阅数据。
**ROS控制台命令**
* ROS控制台命令是ROS系统中的基本命令,用于管理ROS节点和主题。
* ROS控制台命令可以用于创建、启动、停止和删除节点和主题。
**Catkin工作空间和构建系统**
* Catkin是ROS系统中的构建系统,用于管理ROS项目的依赖关系和编译过程。
* Catkin工作空间是ROS项目的基本目录结构,用于存放ROS项目的源代码和配置文件。
**Launch文件**
* Launch文件是ROS系统中的配置文件,用于定义ROS节点的启动参数和配置。
* Launch文件可以用于定义ROS节点的依赖关系和启动顺序。
**Gazebo仿真器**
* Gazebo是一个开源的机器人仿真器,用于模拟机器人的运动和感知。
* Gazebo可以与ROS系统集成,用于模拟机器人的运动和感知。
**ROS包结构**
* ROS包是ROS系统中的基本单元,用于管理ROS项目的依赖关系和配置。
* ROS包结构包括 package.xml、CMakeLists.txt和src目录等。
**Integration and Programming with Eclipse**
* Eclipse是一个集成开发环境(IDE),用于开发和调试ROS项目。
* Eclipse可以与ROS系统集成,用于开发和调试ROS项目。
**ROSC++客户端库**
* ROSC++客户端库是ROS系统中的C++客户端库,用于开发ROS应用程序。
* ROSC++客户端库提供了一系列的API,用于与ROS系统交互。
**ROS订阅者和发布者**
* ROS订阅者是ROS系统中的订阅者,负责订阅ROS主题的数据。
* ROS发布者是ROS系统中的发布者,负责发布ROS主题的数据。
**ROS参数服务器**
* ROS参数服务器是ROS系统中的参数服务器,用于存储和管理ROS项目的配置参数。
* ROS参数服务器可以用于存储和管理ROS项目的配置参数。
**RViz可视化**
* RViz是一个开源的可视化工具,用于可视化机器人的运动和感知。
* RViz可以与ROS系统集成,用于可视化机器人的运动和感知。
**TF变换系统**
* TF变换系统是ROS系统中的变换系统,用于管理机器人的空间变换。
* TF变换系统可以用于管理机器人的空间变换和运动。
**rqt用户界面**
* rqt是一个开源的用户界面工具,用于提供机器人的可视化和交互界面。
* rqt可以与ROS系统集成,用于提供机器人的可视化和交互界面。
**Robot模型(URDF)**
* URDF(Unified Robot Description Format)是ROS系统中的机器人模型语言,用于描述机器人的结构和运动。
* URDF可以用于描述机器人的结构和运动。
**Simulation descriptions(SDF)**
* SDF(Simulation Description Format)是ROS系统中的仿真描述语言,用于描述机器人的仿真环境。
* SDF可以用于描述机器人的仿真环境和运动。
**ROS服务**
* ROS服务是ROS系统中的服务,用于提供机器人的基本功能。
* ROS服务可以用于提供机器人的基本功能,例如运动控制和感知。
**ROS操作(actionlib)**
* actionlib是一个ROS系统中的操作库,用于提供机器人的高级功能。
* actionlib可以用于提供机器人的高级功能,例如任务规划和执行。
**ROSTime**
* ROSTime是ROS系统中的时间管理系统,用于管理机器人的时间和同步。
* ROSTime可以用于管理机器人的时间和同步。
**ROSbags**
* ROSbags是ROS系统中的数据存储系统,用于存储和管理机器人的感知数据。
* ROSbags可以用于存储和管理机器人的感知数据。
||
Péter Fankhauser
6
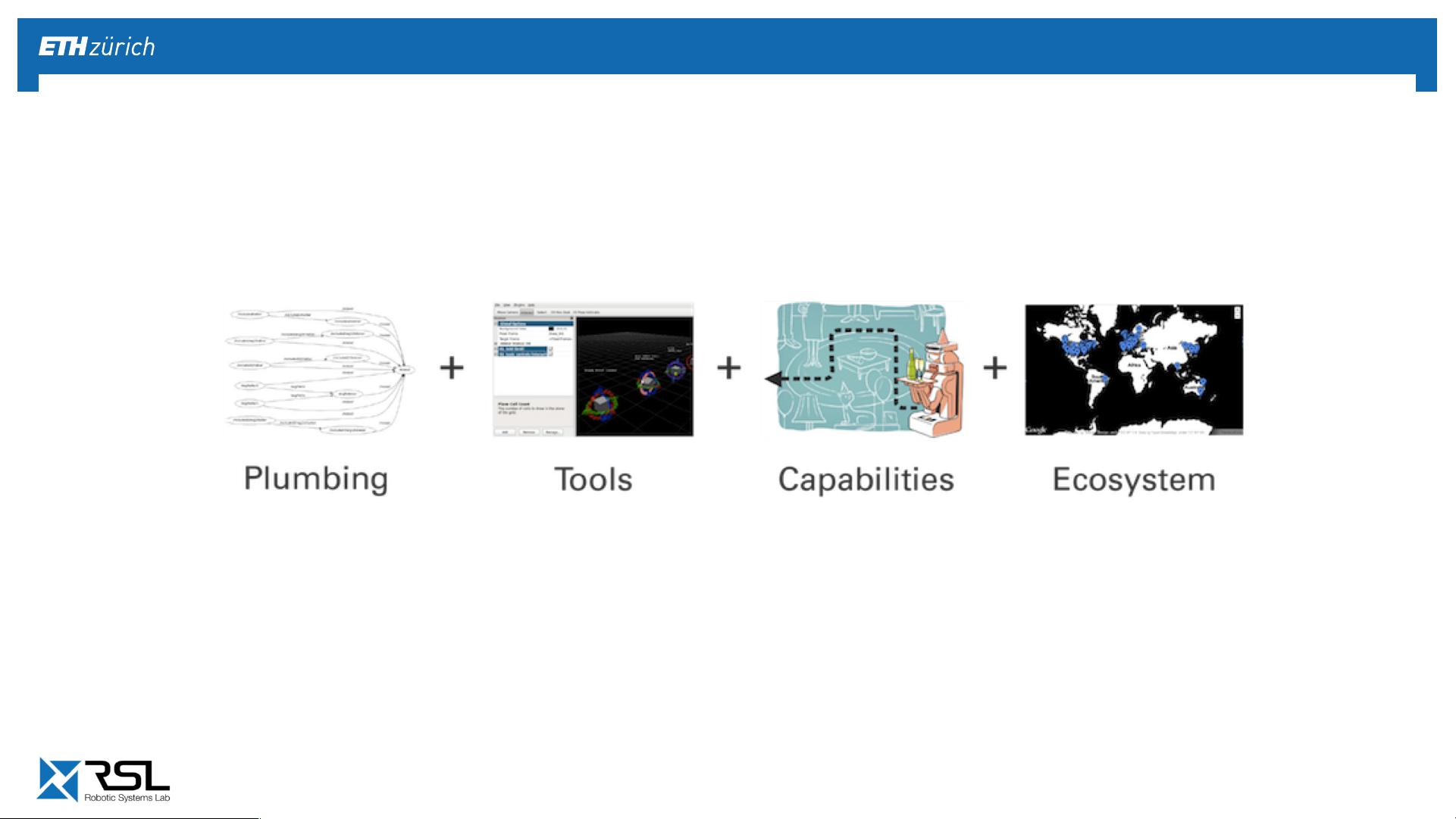
What is ROS?
ROS = Robot Operating System
§ Process
management
§ Inter-process
communication
§ Device drivers
§ Simulation
§ Visualization
§ Graphical user
interface
§ Data logging
§ Control
§ Planning
§ Perception
§ Mapping
§ Manipulation
§ Package organization
§ Software distribution
§ Documentation
§ Tutorials
ros.org
16.02.2018

剩余32页未读,继续阅读
2021-11-14 上传
2019-09-11 上传
2023-06-18 上传
2023-06-18 上传
2023-06-18 上传
2023-06-18 上传
2023-06-18 上传









