激光雷达与毫米波雷达融合:提升自动驾驶目标检测精度与速度
版权申诉
139 浏览量
更新于2024-06-16
4
收藏 31.32MB PDF 举报
本研究论文聚焦于自动驾驶领域中基于激光雷达和毫米波雷达的融合目标检测方法。随着自动驾驶技术的迅速发展,精确且实时的目标检测对于确保车辆安全至关重要。现有的自动驾驶车辆通常配备摄像头、激光雷达和毫米波雷达等多种传感器,其中激光雷达在检测行人和车辆方面发挥关键作用,但在复杂城市道路和雨雾环境中表现不足。
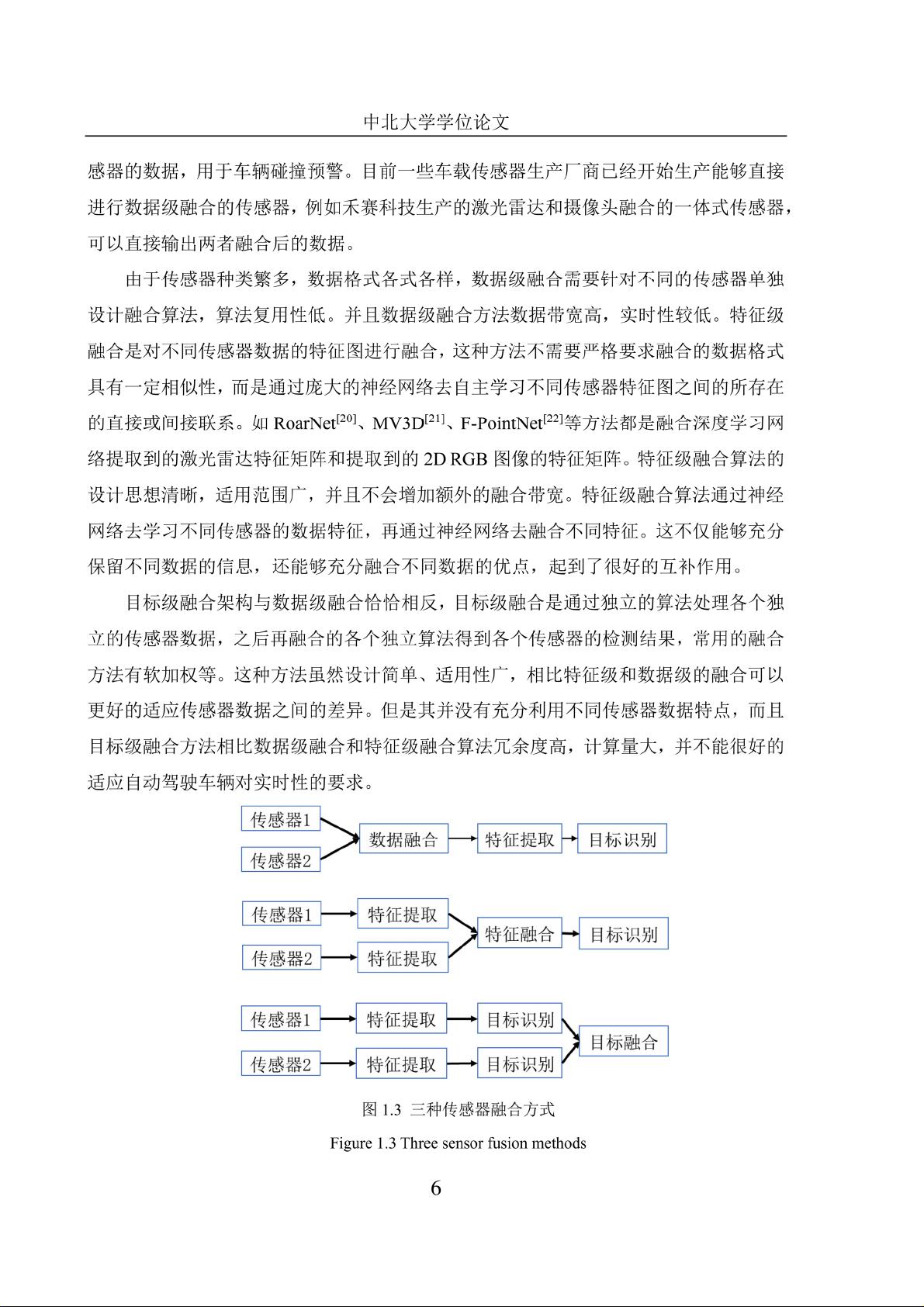
为解决这些问题,作者提出了两种创新融合策略。首先,针对激光雷达在复杂环境下的不足,他们设计了一种激光雷达与毫米波雷达的注意力融合算法。通过对激光雷达和毫米波雷达的数据进行预处理,包括空间对齐(通过获取惯性导航单元相关的旋转和平移矩阵,使数据处于同一坐标系)和时间对齐(根据扫描频率同步标注帧),然后采用离散体素编码将数据转化为大小相同的伪图像,利用特征提取网络提取特征图,并通过注意力机制融合两种传感器的特性,从而增强激光雷达在遮挡、雨雾和远距离目标检测上的性能。
其次,针对激光雷达目标检测算法的计算资源消耗问题,作者提出了一种毫米波雷达辅助的候选框生成方法。利用毫米波雷达的穿透性和位置估计优势,设计了一种雷达区域提议网络(RRPN),该网络能够生成稀疏的候选框,显著减少激光雷达算法在大规模场景下搜索目标时的计算负担,提升检测速度。
整个研究涉及了从原始数据的预处理,到特征融合算法的设计,再到实际应用的优化,旨在通过激光雷达和毫米波雷达的有效融合,提升自动驾驶系统在各种环境条件下的目标检测性能,同时兼顾实时性和效率。这是一项具有实际应用价值的毕业设计,对于推动自动驾驶技术的发展具有重要意义。


2023-12-27 上传
2024-03-25 上传
2024-06-01 上传
2024-06-03 上传
149 浏览量
2024-07-23 上传
点击了解资源详情
125 浏览量

电气_空空
- 粉丝: 5215
- 资源: 1350
 我的内容管理
展开
我的内容管理
展开







最新资源
- 导入和读取 Excel 文件:使用 ActiveX 将 Excel 数据导入工作区的自定义且灵活的功能。-matlab开发
- bguerel:本努尔·古雷尔
- cachlamhay
- devopstools.guthub.io
- makehuman-0.8_beta_src.tar.gz
- 新浪微博小助手 龙网新浪微博小助手 v9.7
- intro-to-java-workshop-Jayh80961:GitHub教室创建的java-workshop-Jayh80961简介
- 行业分类-设备装置-一种承坐式万向运动平台.zip
- tensorscript:移至https
- CV
- 协程:学校Opdracht
- 基于神经网络的图像分类和bp算法 matlab实现 图像分类.zip
- bw-ssh-docs:Bitwarden SSH管理器文档
- 行业分类-设备装置-一种接地电容的RC常数测量方法.zip
- lin_interp(T, var_name, TBDx):内插表值-matlab开发
- 强制粘帖0.2.zip
