惯性MEMS在稳定系统中的频率响应分析
需积分: 0 71 浏览量
更新于2024-09-01
收藏 321KB PDF 举报
"本文主要探讨了稳定系统中的惯性微机电系统(MEMS)的频率响应,特别是如何在振动和不规则运动环境中确保仪器的最佳性能。稳定系统是用于抵消振动影响,保持平台稳定的关键技术,广泛应用于无人机监控设备、海上微波接收机和车辆红外成像系统等领域。系统采用闭环控制,通过伺服电机进行角向运动校正,并依赖于反馈传感器和控制器提供的方位信息。"
在稳定系统中,惯性测量单元(IMU)扮演着核心角色。IMU通常包含三个轴向的陀螺仪和加速度计,用于检测角速度、加速度以及角定向。陀螺仪测量的是角速率,即平台的旋转速度,而加速度计则用于感应静态和动态加速度,包括对重力的响应。在存在振动和快速运动时,加速度计的原始测量需要通过滤波器和数据融合算法进行处理,以获得准确的平均定向信息。
MEMS技术在惯性传感器中的应用显著降低了成本并提高了性能。MEMS陀螺仪可以提供高精度的角速率数据,而MEMS加速度计则能敏感地捕捉到微小的加速度变化。由于单一传感器可能无法在所有条件下都提供最优性能,所以稳定系统通常会在每个轴向使用多种传感器类型,通过传感器数据融合来提高测量的可靠性和准确性。
频率响应是评估这些传感器性能的关键指标。它描述了传感器对不同频率输入信号的响应能力,对于理解和优化稳定系统至关重要。在稳定系统中,尤其是在高速运动或强振动环境下,需要传感器具有宽广的频率响应范围,以便有效地跟踪和补偿各种动态运动。例如,陀螺仪的高频响应可以帮助快速校正快速旋转,而加速度计的低频响应则有助于识别和抵消慢速的平台移动。
为了设计出高效稳定的系统,工程师需要深入理解这些惯性传感器的频率特性,并据此选择和校准传感器。通过调整控制器参数,如PID(比例-积分-微分)控制器,可以优化系统对不同频率输入的响应,确保在各种环境条件下的稳定性能。
总结来说,稳定系统中的惯性MEMS传感器,尤其是其频率响应特性,对于保证监控设备、通信系统和导航仪器在动态环境中的精准运作起着决定性作用。通过精密的传感器设计、多传感器融合和智能控制策略,可以克服振动和运动干扰,实现平台的精确稳定,从而提升整个系统的整体性能。
分析稳定系统中的惯性分析稳定系统中的惯性MEMS的频率响应的频率响应
稳定系统简介 无人飞行器安装的监控设备、海上微波接收机、车辆安装的红外成像系统传感器以及其他仪
器系统都需要具有稳定的平台,以达到最佳性能,但它们通常在可能遇到振动和其他类型不良运动的应用中使
用。振动和正常车辆运动会导致通信中断、图像模糊以及其他很多行为,从而降低仪器的性能和执行所需功能
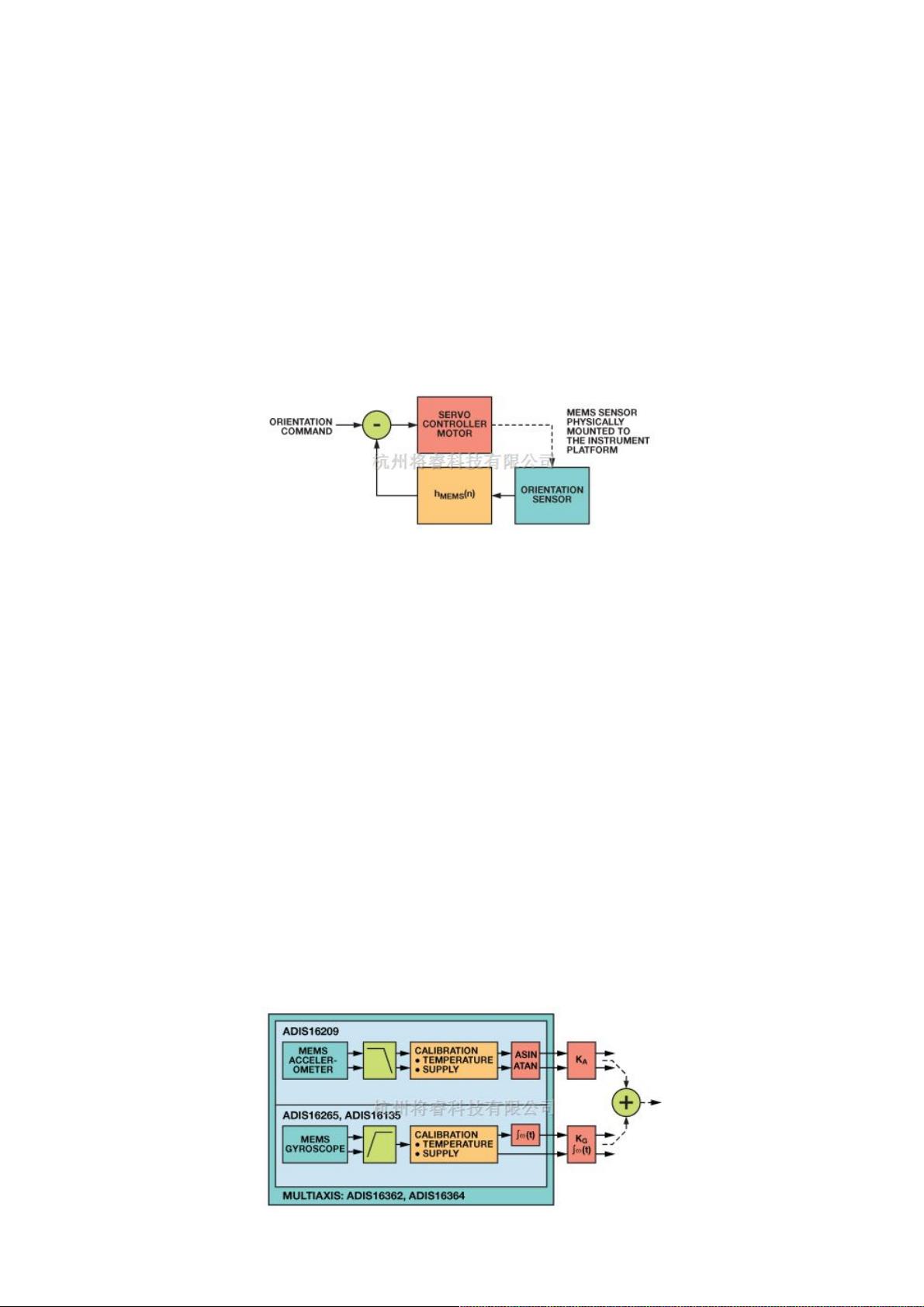
的能力。平台稳定系统采用闭环控制系统,以主动消除此类运动,从而保证达到这些仪器的重要性能目标。图1
是平台稳定系统的整体框图,它使用伺服电机来校正角向运动。反馈传感器为仪器平台提供动态方位信息。反
馈控制器处理这些信息,并将其转换为伺服电机的校正控制信号。 图1. 基本平台稳定系统。 由于很多稳定
系
稳定系统简介稳定系统简介
无人飞行器安装的监控设备、海上微波接收机、车辆安装的红外成像系统传感器以及其他仪器系统都需要具有稳定的平
台,以达到最佳性能,但它们通常在可能遇到振动和其他类型不良运动的应用中使用。振动和正常车辆运动会导致通信中断、
图像模糊以及其他很多行为,从而降低仪器的性能和执行所需功能的能力。平台稳定系统采用闭环控制系统,以主动消除此类
运动,从而保证达到这些仪器的重要性能目标。图1是平台稳定系统的整体框图,它使用伺服电机来校正角向运动。反馈传感
器为仪器平台提供动态方位信息。反馈控制器处理这些信息,并将其转换为伺服电机的校正控制信号。
图1. 基本平台稳定系统。
由于很多稳定系统需要多个轴向的主动校正,因此惯性测量单元(IMU)通常包括至少三个轴向的陀螺仪(测量角速度)
和三个轴向的加速度计(测量加速度和角定向)来提供反馈检测功能。反馈传感器的最终目标是提供平台定向的精确测量,即
使当平台正在运动时也要做到。由于没有"万能"传感器技术能够在任何条件下提供精确的角度测量,因此平台稳定系统中的
IMU通常在每个轴上使用两种或三种传感器类型。
加速度计响应每个轴向上的静态和动态加速。"静态加速度"似乎是一个陌生的词汇,但它涉及重要的传感器行为:对重力
的响应。假定不存在动态加速,并通过校准消除了传感器误差,则每个加速度计输出将代表它的相对于重力的轴定向。为了确
定在存在振动和快速加速的情况下稳定系统中通常出现的实际平均定向,通常会将滤波器和融合程序(组合来自多个传感器类
型的读数,得出最佳估计值)应用于原始测量
另一种类型的传感器是陀螺仪,它提供角速率测量。陀螺仪测量通过有限周期内的角速率的积分,在角度测量中发挥作
用。执行积分时,偏置误差将导致成比例的角度漂移,随时间累加。因此,陀螺仪性能通常与设备偏置对不同环境因素的灵敏
度相关,这些因素包括温度变化、电源变化、离轴旋转和线性加速度(线性g和整流g × g)。校准的高质量陀螺仪,具有对线
性加速度的高抑制,使这些设备能够提供宽带角信息,作为对加速度计提供的低频信息的补充。
第三种类型的传感器是3轴磁力计,它可以测量磁场强度。从三个正交轴的磁场测量实现了相对于地球磁场本地方向的定
向角估算。当磁力计接近电机、显示器和其他动态磁场干扰源时,管理其精度可能非常困难,但在适当情况下,它的角度数据
可作为来自加速度计和陀螺仪的数据的补充。虽然很多系统仅使用加速度计和陀螺仪,但磁力计可以改进某些系统的测量精
度。
图2的整体框图显示了如何使用陀螺仪和加速度计测量,既利用它们的基本优势,同时又最大程度减少它们的弱点产生的
影响。低通加速度计和高通陀螺仪滤波器的极点位置通常取决于应用,另外精度目标、相位延迟、振动和"正常"运动预测都会
对位置决定产生影响。因系统而异的行为也会影响加权因子,而加权因子会对如何组合这两种测量产生影响。扩展卡尔曼滤波
器就是一个组合滤波和加权函数以计算动态角度估计的算法的例子。
图2. 组合单轴传感器输出。
下载后可阅读完整内容,剩余5页未读,立即下载
2021-05-22 上传
2021-01-20 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-08-09 上传
2021-09-25 上传

weixin_38732454
- 粉丝: 6
- 资源: 952
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
