自适应模糊控制在AGV轨迹跟踪中的应用与仿真分析
"基于模糊控制的轨迹跟踪研究及仿真,探讨了如何使用模糊控制技术解决自动导引运输车(AGV)的轨迹跟踪问题。通过建立AGV的运动学模型,设计自适应模糊控制器,并在MATLAB/Simulink环境下进行仿真验证,证明了这种方法的有效性和稳定性。"
本文深入研究了如何利用模糊控制理论来实现自动导引运输车(AGV)的精确轨迹跟踪。在物流运输等领域,AGV的应用越来越广泛,但其轨迹跟踪问题因其非线性特性给传统控制方法带来了挑战。传统的控制策略,如PID控制,往往无法满足此类系统的高精度和稳定性需求。模糊控制作为一种智能控制策略,能有效处理不确定性和非线性问题,因此在AGV轨迹跟踪中展现出优越性能。
文章首先详细介绍了AGV的运动学模型构建过程。通过对AGV的动力学特性和运动规律的分析,建立了一个能够描述其动态行为的数学模型,这是设计控制策略的基础。
接下来,作者利用李雅普诺夫函数设计控制律,确保系统的稳定性。李雅普诺夫函数是一种常用工具,用于分析和证明系统的稳定性。通过对系统状态的分析,可以得出控制输入的更新规则,以保证系统的稳定运行。
关键创新在于设计了一种自适应模糊控制器。这种控制器的输入是AGV实际位置与目标位置的偏差,包括距离偏差和角度偏差,输出则是控制律的比例因子。模糊逻辑被用来处理这些偏差,通过模糊推理生成合适的控制响应,以减小误差并优化跟踪性能。
在MATLAB/Simulink环境中,对所提出的模糊控制系统进行了仿真。仿真结果表明,无论面对何种复杂或变化的参考轨迹,该模糊控制器都能快速准确地进行跟踪,体现了其良好的收敛性和稳定性。这不仅验证了模糊控制在解决AGV轨迹跟踪问题上的有效性,也为实际应用提供了理论依据。
关键词:自动导引运输车(AGV),轨迹跟踪,模糊控制,自适应,MATLAB仿真,李雅普诺夫函数
这篇研究论文通过理论分析、模型建立和仿真实验,全面阐述了模糊控制在AGV轨迹跟踪中的应用,为相关领域的研究和工程实践提供了有价值的参考。
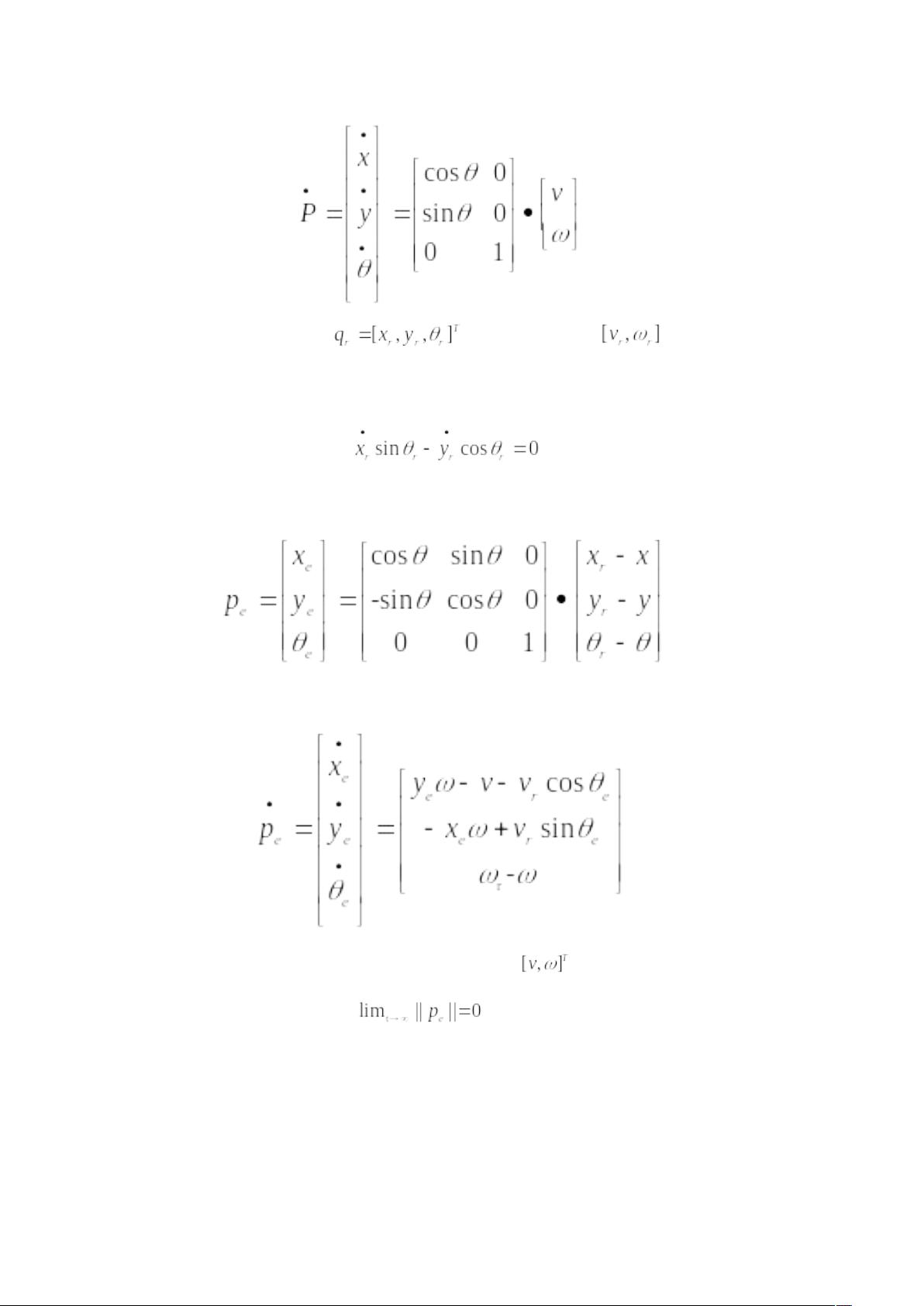
(1-1)
假设期望的轨迹为 ,期望的状态为 ,AGV 小车模
型满足非完整移动机器人非完整约束条件,即公式 1-2:
(1-2)
根据坐标转换,可得系统的误差方程为:
(1-3)
对其误差方程求导可得位姿误差微分方程
[1]
:
(1-4)
AGV 小车轨迹跟踪的目标就是寻找控制律 ,使得对任意误差,系统的
误差方程均能收敛到 0,即 。
二、AGV 小车轨迹跟踪控制律设计
根据小车的位姿误差微分方程,利用反演控制器设计的思想,设计合理的
4
剩余18页未读,继续阅读
相关推荐






xjyxiamen
- 粉丝: 39
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







