深度学习驱动的端到端人脸识别:2020年最新进展综述
需积分: 10 19 浏览量
更新于2024-07-15
收藏 9.45MB PDF 举报
《端到端人脸识别:2020年综述论文》深入探讨了深度学习时代下人脸识别技术的最新进展。人脸识别作为计算机视觉的核心领域,其历史可以追溯至早期,但随着深度卷积神经网络(Deep Convolutional Neural Networks, DCNNs)的崛起和大规模人脸数据集的积累,该领域的技术性能得到了显著提升,逐渐成为现实世界广泛应用的基石。
在端到端的深度人脸识别系统中,其工作流程可以概括为三个关键组件:面部检测、面部预处理和面部表示。首先,面部检测模块负责在输入的自然图像或视频帧中定位人脸区域,这是识别过程的基础,确保后续步骤能准确地聚焦于潜在的人脸特征。
面部预处理环节则对检测出的人脸进行规范化处理。这包括对人脸进行姿态校正,使其朝向一个标准视图,以及对人脸区域进行裁剪,将其缩放到固定的像素大小。这一阶段旨在消除光照、角度和姿势变化等因素对识别结果的影响,提高模型的鲁棒性。
最后,面部表示阶段是整个流程的核心,通过深度学习网络提取并生成高度抽象且区分度高的特征表示。这些特征不仅包含了个体的独特性,还能有效地抵抗噪声、遮挡和表情变化等挑战。通常,深度卷积神经网络被设计成多层结构,每一层负责捕捉不同层次的特征,从低级的边缘和纹理特征,到高级的面部结构和身份特征。
近年来的研究重点在于优化这三个组件之间的协同作用,提升模型的精度和速度。例如,一些工作致力于改进面部检测算法,使其更精确、实时;另一些研究则探索更高效的预处理方法,如轻量级的特征提取网络,以减少计算资源消耗。此外,还有人在设计更深层次的网络架构,以及结合多模态信息(如面部表情、纹理和3D结构)来增强识别性能。
这篇综述论文详细回顾了这些最新的研究成果,展示了端到端深度人脸识别在理论与实践中的最新突破,为研究人员提供了宝贵的参考,同时也为实际应用中的实时和高精度人脸识别技术提供了指导方向。未来,随着AI技术的不断进步,端到端人脸识别系统有望在安全验证、社交媒体分析、甚至虚拟现实等领域发挥更大的作用。
8
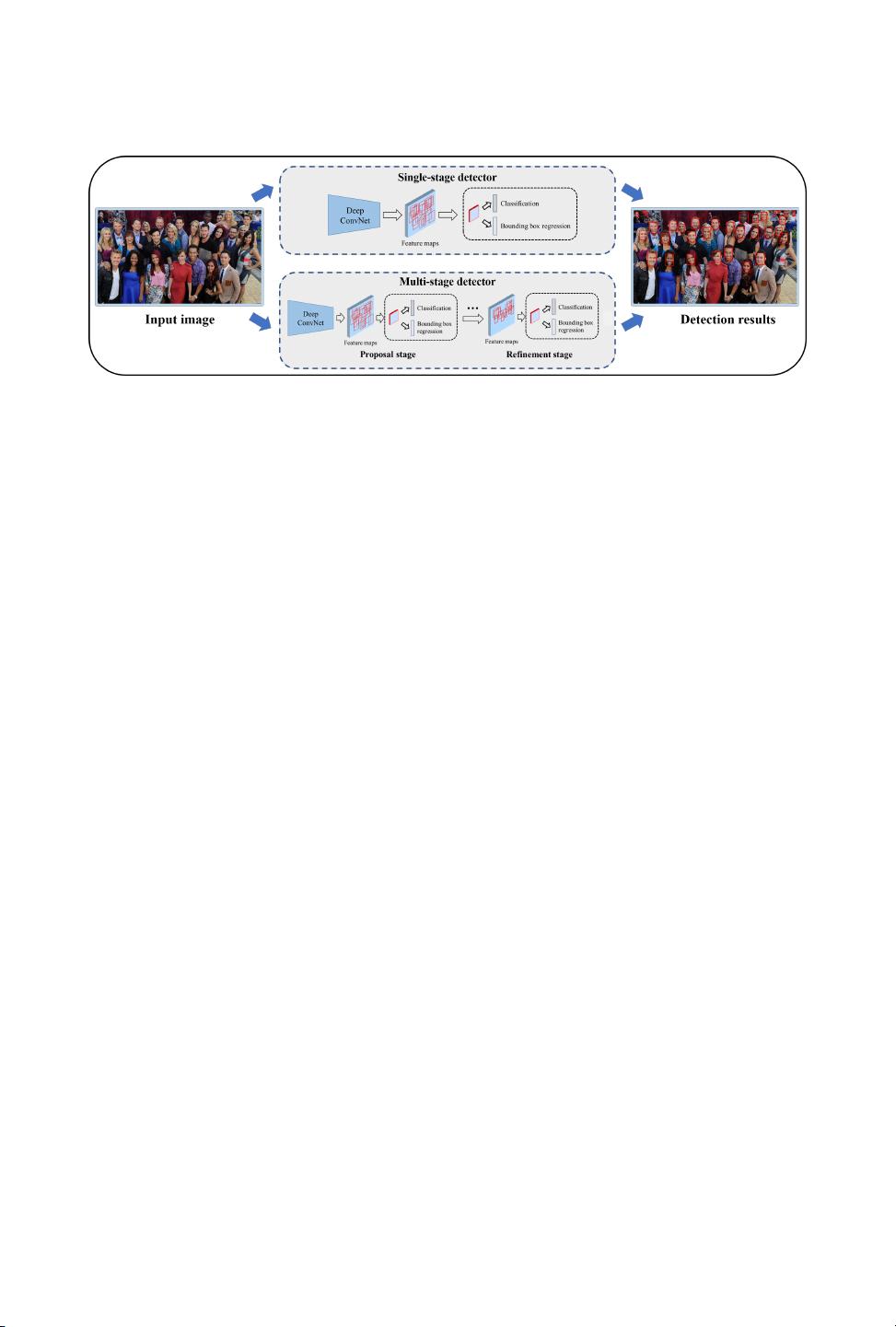
Fig. 5. The illustration of single-stage and multi-stage face detectors. The single-stage detector directly
accomplishes the face detection from the entire feature maps, whereas the multi-stage detector adopts a
proposal stage to generate candidates and one or more stages to refine these candidates.
Apart from the modeling, how the train the multi-stage detector is another interesting topic.
The multi-stage detectors are commonly trained stage by stage, since each stage is supervised
by its own objective. This may lead to inferior optimization. To handle this issue, a joint training
strategy [
178
] was designed for both Cascaded CNN [
123
] and Faster R-CNN to achieve end-to-end
optimization and better performance on face detection.
3.1.2 Single-stage methods. The single-stage methods accomplish the candidate classication and
bounding box regression from the entire feature maps directly, without involving the proposal
stage.
A classic structure of single stage comes from a general object detector named Single Shot
multibox Detector (SSD) [
142
]. Similar to RPN, SSD presets dense anchor boxes over dierent
ratios and scales on the feature maps. SSD is a prevailing framework in object detection because it
runs much faster than Faster R-CNN while maintaining comparable accuracy. So, many developers
employed SSD for face detection in applications. However, SSD is not robust enough to large scale
variation, especially to the small faces. Afterward, many methods [
99
,
224
,
327
–
329
] studied to
modify SSD for face detection. For example, Zhang et al. [
328
] designed a scale-equitable version
to obtain adequate features from the faces of dierent scales.
Many state-of-the-art face detectors resort to the feature pyramid network (FPN) [
132
] which
consists of a top-down architecture with skip connections and merge the high-level and low-level
features for detection. The high-level feature maps have more semantic information, while the
low-level layers have smaller receptive eld but more detailed local information. The feature fusion
preserves the advantages from both sides, and brings great progress in detecting objects with a
wide range of scales. Therefore, many single-stage face detectors [
31
,
41
,
124
,
130
,
168
,
224
,
225
,
244
,
318
,
326
] are developed with the advantage of FPN. Not only handling the scale issue in face
detection via FPN, but also these methods attempt to solve the inherent shortcomings of original
FPN such like the conict of receptive eld. The special feature fusion operation [
124
,
130
,
224
] is
also suitable for tackling the hard cases of face detection, such as blur and occluded faces.
Although the single-stage methods have the advantage of high eciency, their detection accuracy
is below that of the two-stage methods. It is partially because the imbalance problem of positives
and negatives brought by the dense anchors, whereas the proposal-to-rene scheme is able to
alleviate this issue. Accordingly, ReneDet [
325
] set up an anchor renement module in its network
to remove large number of negatives. Inspired by ReneDet, SRN [
31
] presented a selective two-step
classication and regression method; the two-step classication is performed at the low-level layers

剩余43页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2010-01-31 上传
2020-04-10 上传
2019-06-28 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

syp_net
- 粉丝: 158
- 资源: 1187
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
