"安川机器人YRC1000操作要领书:通用和搬运设置说明"
需积分: 5 123 浏览量
更新于2024-01-13
收藏 7.72MB PDF 举报
本文是针对安川机器人YRC1000通用和搬运的设置说明进行总结。文档中主要包含了通用用途和搬运用途两个部分的操作要领。
在通用用途部分,文档详细介绍了以下内容:
1.1 简单示教步骤:介绍了YRC1000的示教操作步骤,帮助用户快速上手。
1.2 工具控制的操作方法:介绍了通过工具进行机器人操作的方法,方便用户直接在实际操作中应用。
1.3 摆焊动作:具体介绍了摆焊动作的操作方法和注意事项。
1.4 作业命令一览:总结了通用用途部分的所有作业命令,方便用户查阅和使用。
在搬运用途部分,文档详细介绍了以下内容:
2.1 搬运:介绍了通过YRC1000进行搬运操作的方法和步骤。
2.1.1 专用键:介绍了搬运专用键的使用方法和功能。
2.1.2 HAND(抓手)命令:具体讲解了通过HAND命令进行抓手控制的方法和功能。
2.1.3 HSEN(抓手传感器)命令:介绍了通过HSEN命令进行抓手传感器控制的方法和功能。
2.1.4 搬运用途诊断画面:指导用户如何使用搬运用途诊断画面进行故障排除和调试。
2.1.5 抓手防碰撞传感器功能:详细介绍了抓手防碰撞传感器的功能和使用方法。
2.1.6 抓手防碰撞传感器输入:介绍了抓手防碰撞传感器输入的设置和使用。
2.1.7 解除抓手防碰撞传感器的输入功能:说明了解除抓手防碰撞传感器输入功能的方法。
2.1.8 气压下降输入信号:介绍了气压下降输入信号的作用和设置方法。
2.2 命令的登录:
2.2.1 HAND命令:详细介绍了登录HAND命令进行搬运操作的步骤和方法。
2.2.2 HSEN命令:讲解了登录HSEN命令进行抓手传感器操作的方法和步骤。
2.3 作业命令一览:总结了搬运用途部分的所有作业命令,方便用户查阅和使用。
总的来说,本文详细介绍了安川机器人YRC1000通用和搬运的设置说明,对于机器人的操作和使用提供了详尽的指导。同时,通过分类和总结的方式,方便用户查阅和使用不同的功能和命令。如果用户能够按照文档中的要点,严格遵循操作步骤和注意事项,将能够更加高效地操作和使用YRC1000机器人。

䙊⭘⭘䙄
ㆰঅ⽪ᮉⲴ↕僔
1-5
⽪ᮉ〻ᒿ
ᡰ䉃〻ᒿቡᱟᢺᵪಘӪⲴъᇩ⭘ᵪಘӪⲴ䈝䀰䘋㹼᧿䘠Ⲵъ〻ᒿDŽ
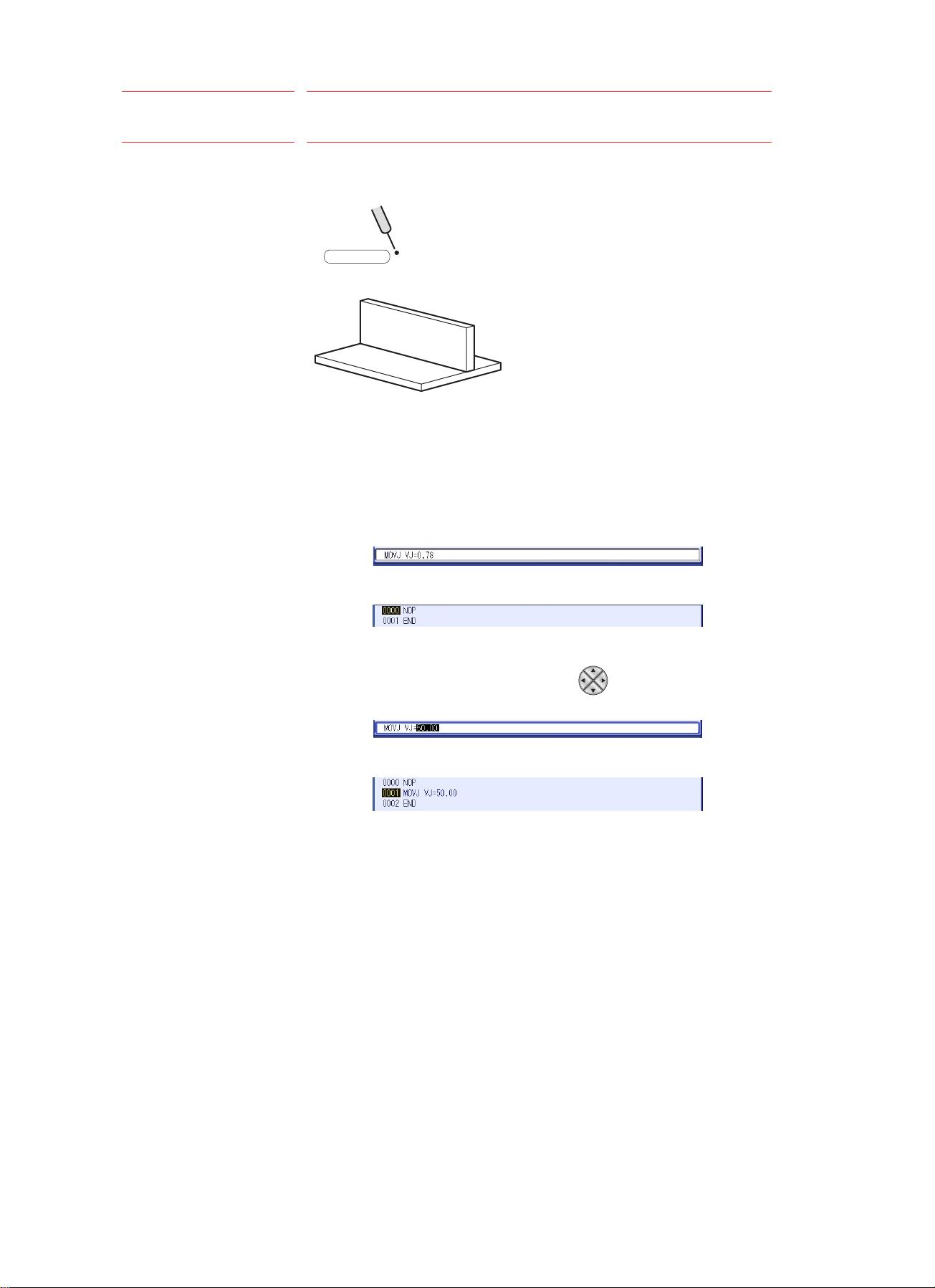
᤹лമᡰ⽪ˈሩᵪಘӪ䘋㹼ӾᐕԦ $ ⛩〫ࣘࡠ % ⛩Ⲵ࣐ᐕ〻ᒿⲴ⽪ᮉDŽ
䈕〻ᒿ⭡〻ᒿ⛩ ˈ њ〻ᒿ⛩㓴ᡀDŽ
മ ⽪ᮉ〻ᒿ
൘↔нڊᇎ䱵ъDŽ
⛬ᗎⅬ
⛬ᗎⅬ
AB
⛬ᗎⅬ ⛬ᗎⅬ
⛬ᗎⅬ
⛬ᗎⅬ
⽪ᮉ
⺞䇔〻ᒿ⛩
⛬ᗎⅬ
᪂⛬ᗎⅬ
⛬ᗎⅬ
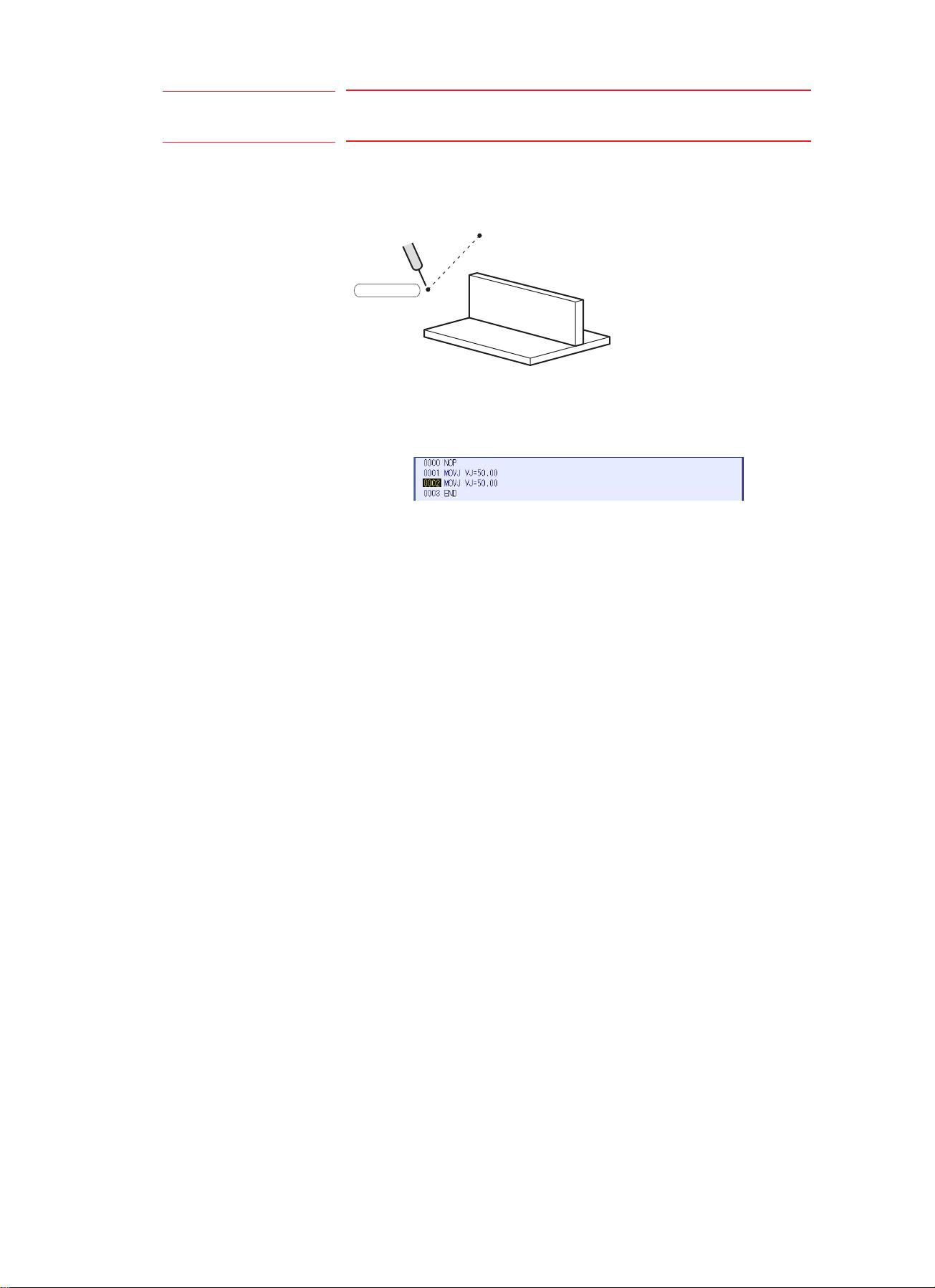
ᴰࡍⲴ〻ᒿ⛩઼
ᴰⲴ〻ᒿ⛩䟽DŽ
ⲫᖅ〻ᒿ⛩DŽ
DŽ
请确认是示教模式ࠋ
请确认机器人与操作人员之间的距离绝对安全。
㸩
⌞ᝅ
ஶྰ
ஶྰ
༮
༮
ዑᅞ
ዑᅞ
ဿ
ဿ
ઌ
ઌ
剩余76页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-04-12 上传
2024-02-21 上传
2020-09-07 上传
2021-07-22 上传
2021-07-22 上传
2024-02-21 上传

yimeng5132
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
