乐幻索尔串口总线舵机通信协议详解
需积分: 50 90 浏览量
更新于2024-08-29
2
收藏 378KB PDF 举报
"串口总线舵机通信协议文档详细介绍了乐幻索尔公司开发的针对机器人和嵌入式系统的舵机通信方法。该协议基于异步串行总线技术,支持多达253个舵机通过串口连接形成链式结构,通过统一的UART接口进行控制。每个舵机都有唯一的节点地址,允许单个或集体操作。
该协议支持两种模式:电机控制和位置控制。在电机控制模式下,舵机可以作为直流减速电机使用,用户能够调整速度;而在位置控制模式下,舵机具有广泛的转动范围,提供精确的位置控制和速度调整。任何兼容半双工UART的接口都能与这种舵机通信。
协议的核心是UART接口原理图,其中明确了时序控制和115200bps的波特率标准,确保了数据传输的高效性和准确性。舵机通过程序代码实现对数据包的解析,包括帧头(连续的0x55)、ID号(0x00-0xFD,广播ID为0xFE)、数据长度、指令、参数和校验和等元素。校验和的计算方法采用异或运算,确保数据传输的完整性。
指令包由特定格式组成,包括指令类型(写指令和读指令),写指令通常包含参数,用于配置舵机执行特定任务;而读指令则无参数,舵机接收到后会立即响应,返回的数据与发送指令相匹配,便于实时反馈。
乐幻索尔串口总线舵机通信协议提供了一套标准化的通信框架,简化了机器人和嵌入式系统中舵机的控制和管理,提高了系统的灵活性和可靠性。掌握这个协议对于开发和维护相关的机器人控制系统至关重要。"
乐幻索尔总线舵机通信协议
1.概要
采用异步串行总线通讯方式,理论多至 253 个机器人舵机可以通过总线组
成链型,通过 UART 异步串行接口统一控制。每个舵机可以设定不同的节点地
址,多个舵机可以统一运动也可以单个独立控制。通过异步串行接口与用户的上
位机(控制器或 PC 机)通讯,您可对其进行参数设置、功能控制。通过异步串行
接口发送指令,可以设置为电机控制模式或位置控制模式。 在电机控制模式下,
可以作为直流减速电机使用,速度可调;在位置控制模式下,拥有 0-240°的转
动范围,外加±30°的偏差可调范围,在此范围内具备精确位置控制性能,速度
可调。只要符合协议的半双工 UART 异步串行接口都可以和舵机进行通讯,对
舵机进行各种控制
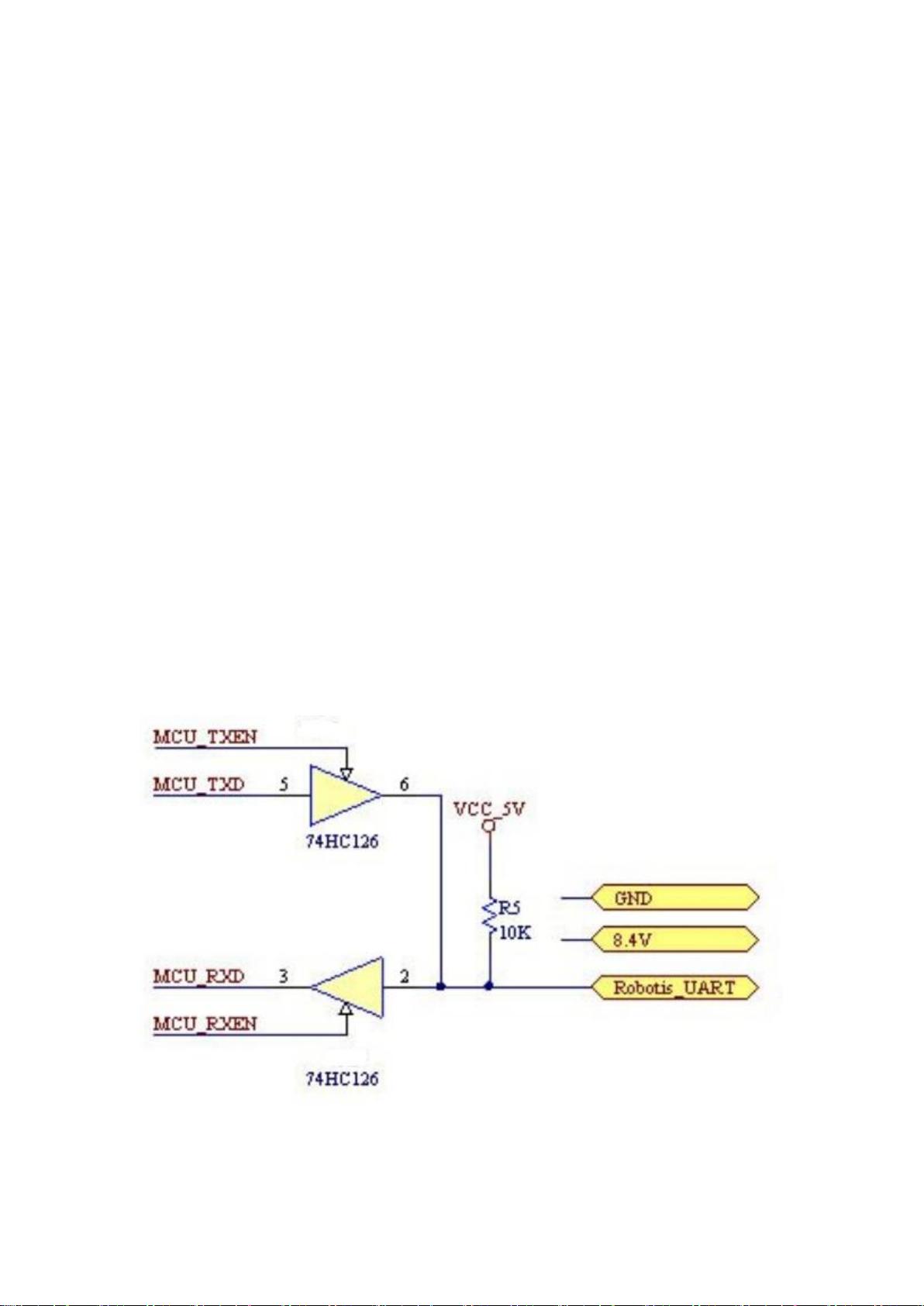
2.UART 接口原理图
舵机用程序代码对 UART 异步串行接口进行时序控制,实现半双工异步串
行总线通讯,通讯波特率为 115200bps,且接口简单、协议精简。在您自行设计
的控制器中,用于和舵机通讯的 UART 接口必须如下图所示进行处理。
图 1
下载后可阅读完整内容,剩余8页未读,立即下载
2021-06-29 上传
2023-09-16 上传
2011-12-06 上传
2019-09-05 上传
2021-09-29 上传
2023-09-16 上传

猪猪爱芮芮
- 粉丝: 24
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
