2019 ICLR:卷积网络中变形稳定性并非必需且不充分
需积分: 0 119 浏览量
更新于2024-08-05
收藏 4.54MB PDF 举报
在2019年的国际计算机视觉与模式识别(ICLR)会议上,一篇匿名作者提交的论文《Pooling Is Neither Necessary nor Sufficient for Appropriate Deformation Stability in CNNs》引起了广泛关注。这篇处于双盲评审阶段的论文探讨了深度学习领域的一个核心假设——卷积神经网络(CNN)在解决图像识别任务时,对小规模的平移和变形是否具有内在稳定性。长久以来,为了实现这种稳定性,设计者们倾向于在CNN架构中嵌入交替池化层。然而,随着近年来对这一做法的质疑,该研究提出了新的问题:我们对于网络对变形的稳定性的直觉是否正确?这种稳定性真的重要吗?以及如果没有池化层,网络如何实现变形不变性?
论文深入地分析了这些疑问,并得出了一些关键发现:
1. **变形稳定性并非二元属性**:论文指出,不同的图像识别任务可能对网络的变形稳定性有不同的需求。这暗示着一种观点,即单一的稳定度标准并不适用于所有场景,网络应当根据任务的特性灵活调整其对变形的敏感程度。
2. **池化功能的重新评估**:以往普遍认为池化是确保网络对变形不变的基础,但研究表明,这种依赖并非必需。这意味着即使没有池化层,CNN也能通过其他机制实现一定程度的变形不变性。
3. **网络内部机制的探究**:研究者探索了在没有池化的情况下,网络是如何在不同层级上实现不同程度的变形稳定性的。这可能涉及到更复杂的特征学习策略,如卷积层的权重分布、网络结构的设计,或者非局部运算的引入等。
4. **实验验证的重要性**:论文强调了严谨的实验方法在验证这些理论假设中的关键作用。通过对大量数据集进行细致的实验,研究人员得以揭示变形稳定性在实际应用中的真实表现。
5. **对未来的启示**:该研究的结果对未来的CNN设计和优化具有深远影响,可能会推动研究人员重新思考网络架构中的池化设计,寻找更高效且适应性更强的变形不变性解决方案。
这篇论文挑战了关于CNN中变形稳定性的传统认识,提出了一个更加精细和动态的观点,并提供了实证证据来支持这一论断。这对于深入理解深度学习模型的工作原理,特别是在处理视觉任务中的变形不变性问题具有重要意义。
Under review as a conference paper at ICLR 2019
(a) (b)
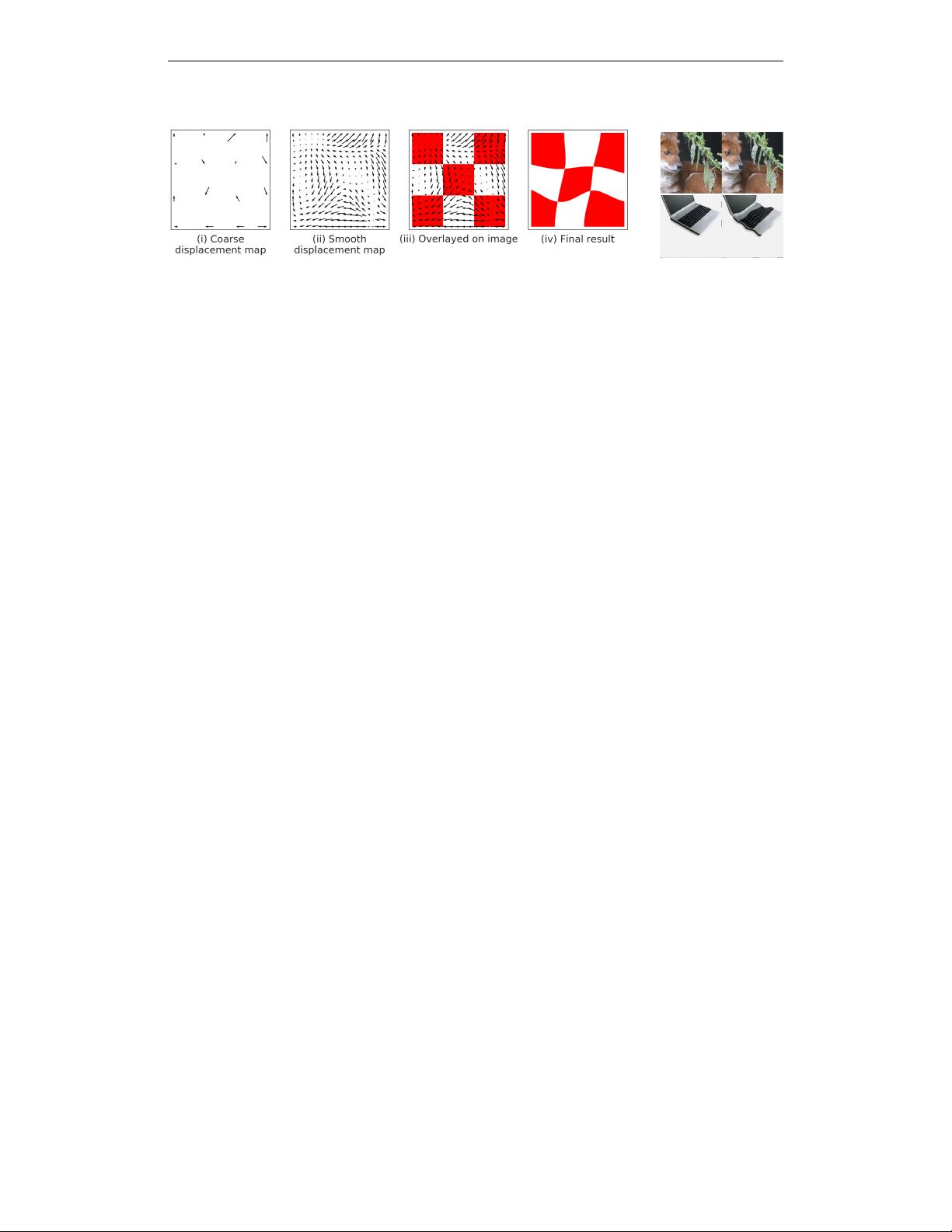
Figure 1: (a)
Generating deformed images
: To randomly deform an image we: (i) Start with a fixed
evenly spaced grid of control points (here 4x4 control points) and then choose a random source for
each control point within a neighborhood of the point; (ii) we then smooth the resulting vector field
using thin plate interpolation; (iii) vector field overlayed on original image: the value in the final
result at the tip of an arrow is computed using bilinear interpolation of values in a neighbourhood
around the tail of the arrow in the original image; (iv) the final result. (b)
Examples of deformed
ImageNet images.
left: original images, right: deformed images. While the images have changed
significantly, for example under the
L
2
metric, they would likely be given the same label by a human.
Empirical investigations.
Previous empirical investigations of these phenomena in CNNs include
the work of Lenc & Vedaldi (2015), which focused on a more limited set of invariances such as
global affine transformations. More recently, there has been interest in the robustness of networks
to adversarial geometric transformations in the work of Fawzi & Frossard (2015) and Kanbak et al.
(2017). In particular, these studies looked at worst-case sensitivity of the output to such transforma-
tions, and found that CNNs can indeed be quite sensitive to particular geometric transformations (a
phenomenon that can be mitigated by augmenting the training sets). However, this line of work does
not address how deformation sensitivity is generally achieved in the first place, and how it changes
over the course of training. In addition, these investigations have been restricted to a limited class of
deformations, which we seek to remedy here.
2 METHODS
2.1 DEFORMATION SENSITIVITY
In order to study how CNN representations are affected by image deformations we first need a
controllable source of deformation. Here, we choose a flexible class of local deformations of image
coordinates, i.e., maps
τ : R
2
→ R
2
such that
k∇τk
∞
< C
for some
C
, similar to Mallat (2012).
We choose this class for several reasons. First, it subsumes or approximates many of the canonical
forms of image deformation we would want to be robust to, including:
• Pose: Small shifts in pose or location of subparts
• Affine transformations: translation, scaling, rotation or shear
• Thin-plate spline transforms
• Optical flow: Roth & Black (2007); Rosenbaum et al. (2013)
We show examples of several of these in Section 2 of the supplementary material.
This class also allows us to modulate the strength of image deformations, which we deploy to
investigate how task demands are met by CNNs. Furthermore, this class of deformations approximates
most of the commonly used methods of data augmentation for object recognition Simard et al. (2003);
Wong et al. (2016); Cire¸san et al. (2010).
While it is in principle possible to explore finer-grained distributions of deformation (e.g., choosing
adversarial deformations to maximally shift the representation), we think our approach offers good
coverage over the space, and a reasonable first order approximations to the class of natural deforma-
tions. We leave the study of richer transformations—such as those requiring a renderer to produce or
those chosen adversarially Fawzi & Frossard (2015); Kanbak et al. (2017)—as future work.
3
剩余11页未读,继续阅读
2022-08-08 上传
2022-08-04 上传
2022-08-04 上传
2022-08-04 上传
2022-08-08 上传
2022-08-08 上传
2022-08-04 上传
2022-08-04 上传
2021-03-25 上传

三山卡夫卡
- 粉丝: 24
- 资源: 323
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
