基于视觉导航的智能轮式移动机器人设计与研究
版权申诉
165 浏览量
更新于2024-03-02
收藏 1.85MB PDF 举报
基于视觉导航的轮式移动机器人设计方案.pdf文件提供了对移动机器人的研究历史进行了概要介绍,并着重强调了移动机器人在智能系统中的重要性以及其设计复杂性。移动机器人是一种自动化的机器,具有与人或生物相似的智能,包括感知能力、规划能力、动作能力和协同能力,是一种灵活性极高的自动化机器。在1962年,美国Unimation公司的第一台机器人Unimate投入使用,标志着第一代机器人的诞生。而在之后的年代,移动机器人的发展逐渐突显出对移动能力和智能系统设计的需求。1968 年到 1972 年间,美国斯坦福国际研究所研制了移动式机器人 Shaky, 这是首台采用了人工智能学的移动机器人。Shaky 具备一定人工智能,能够自主进行感知、环境建模、行为规划并执行任务。然而,当时的计算机体积庞大且运算速度缓慢,导致Shaky需要数小时的时间来分析环境和规划行动路径。
因此,如何通过视觉导航来提高移动机器人的智能水平成为了当前研究的重点之一。基于视觉导航的轮式移动机器人设计方案.pdf文件就通过对移动机器人的研究历史和发展进行概要介绍,并重点介绍了基于视觉导航的轮式移动机器人设计方案。
基于视觉导航的轮式移动机器人设计方案.pdf文件中指出了考虑轮式移动机器人在复杂不确定性环境中的移动能力和智能系统设计复杂性的重要性。由于轮式移动机器人需要通过视觉导航来进行环境感知和路径规划,因此对视觉导航系统的设计和优化显得尤为重要。相比传统的移动机器人,轮式移动机器人面临更为复杂的环境和动作要求,因此对其进行有效的视觉导航系统设计将在提高移动机器人智能水平上发挥重要作用。
另外,基于视觉导航的轮式移动机器人设计方案.pdf文件还着重介绍了在视觉导航系统中所涉及的各项关键技术,包括环境感知、路径规划、障碍物避让、目标识别等方面的技术,并对这些技术在轮式移动机器人设计中的应用进行了探讨。通过对这些关键技术的综合应用,基于视觉导航的轮式移动机器人将能够在复杂的环境中更加智能和灵活地进行移动和规划。
总之,基于视觉导航的轮式移动机器人设计方案.pdf文件从移动机器人的发展历史和现状出发,重点介绍了视觉导航系统对轮式移动机器人设计的重要性,并对在视觉导航系统中所涉及的关键技术进行了详细展开说明。这一设计方案的提出将为轮式移动机器人的智能化和灵活性提供重要的理论基础和技术支持,对未来移动机器人的发展具有重要的参考意义。
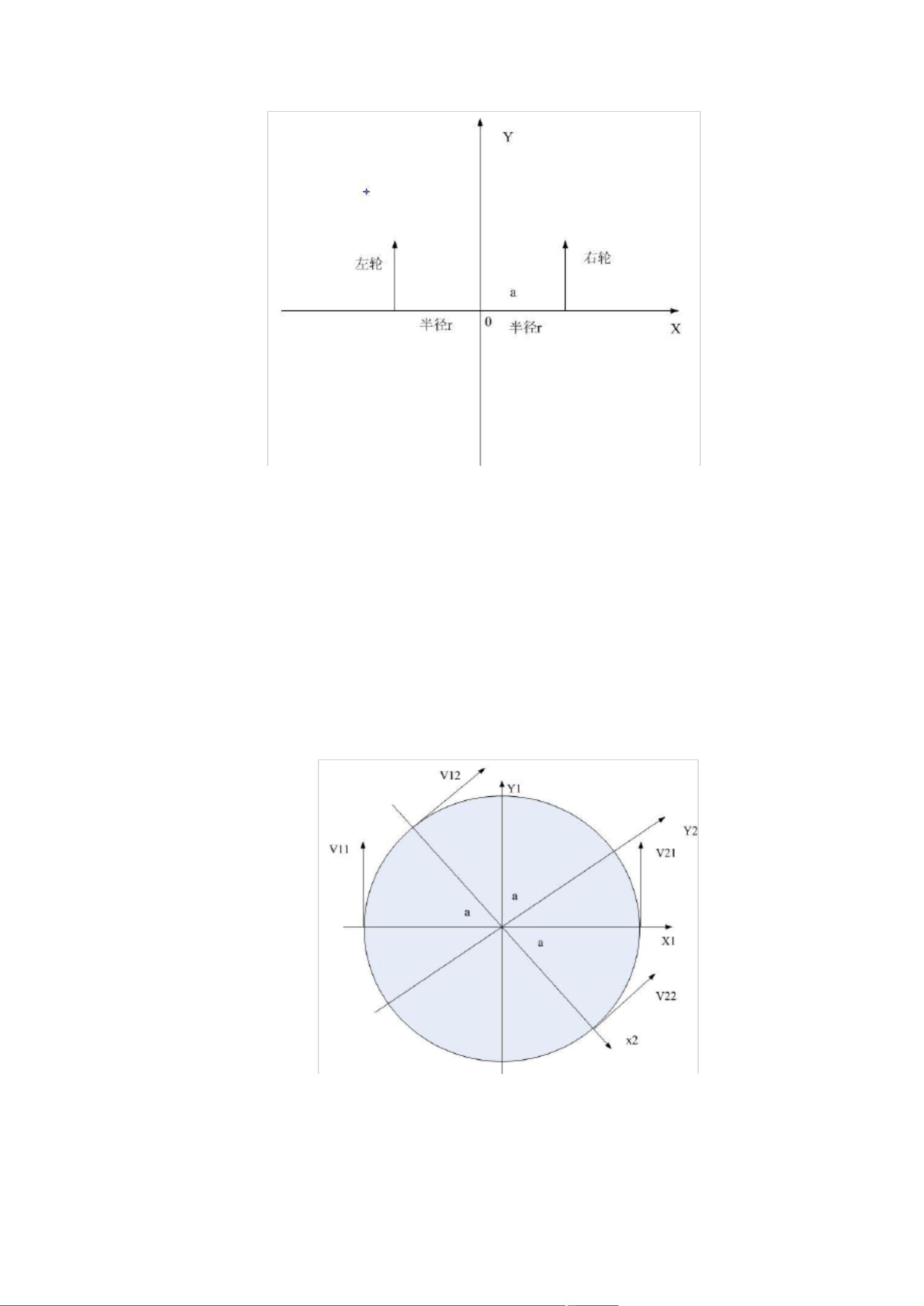
图 2-3 机器人直线运动示意图
(4)
当距离 L 改变时,我们判断 L 的大小,当 L>0 时,移动机器人
前进转弯。当 L<0 时,移动机器人后退转弯。之后我们判断,
移动机器人的转动角度 a,当 a 不为 0 时,则移动机器人转弯。
当 a>0 时,移动机器人右转弯。 a<0 时,移动机器人左转弯。
当机器人前进左转时,左轮正转,右轮反转。当机器人前进右
转时,左轮反转,右轮正转。机器人后退右转时,左轮正转,
右轮反转。机器人后退左转时,左轮反转,右轮正转。
图 2-4 机器人转向运动示意图
具体的分析和计算会在以下的论文中 4.2 节中介绍。
剩余49页未读,继续阅读
2022-04-02 上传
2021-07-13 上传
2021-08-14 上传
2021-08-14 上传
2021-08-14 上传
2021-08-13 上传

hhappy0123456789
- 粉丝: 74
- 资源: 5万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
